This page is archived.
It is kept only for reference purposes, so it is no longer being updated and may not meet accessibility standards.
If you need this content in a different format, please email Prof. Ron Fearing.
| Tactile Sensing
|
||
  Tele-Taction and Tactile Sensing (1982-2002) |
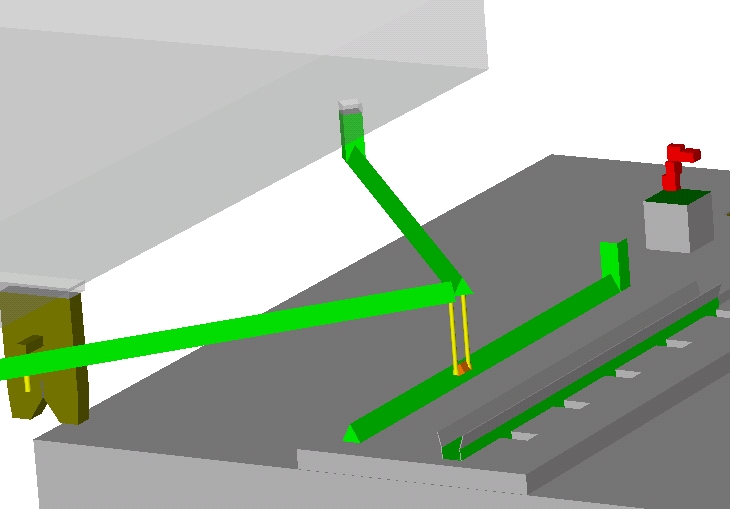
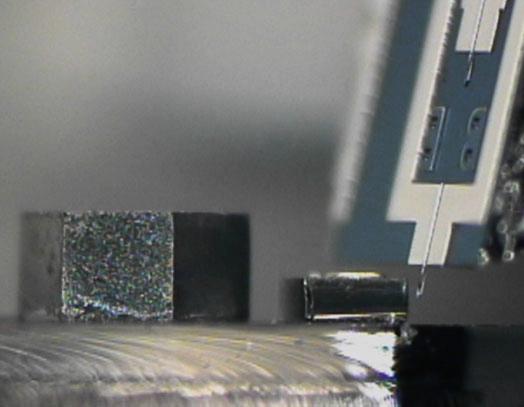
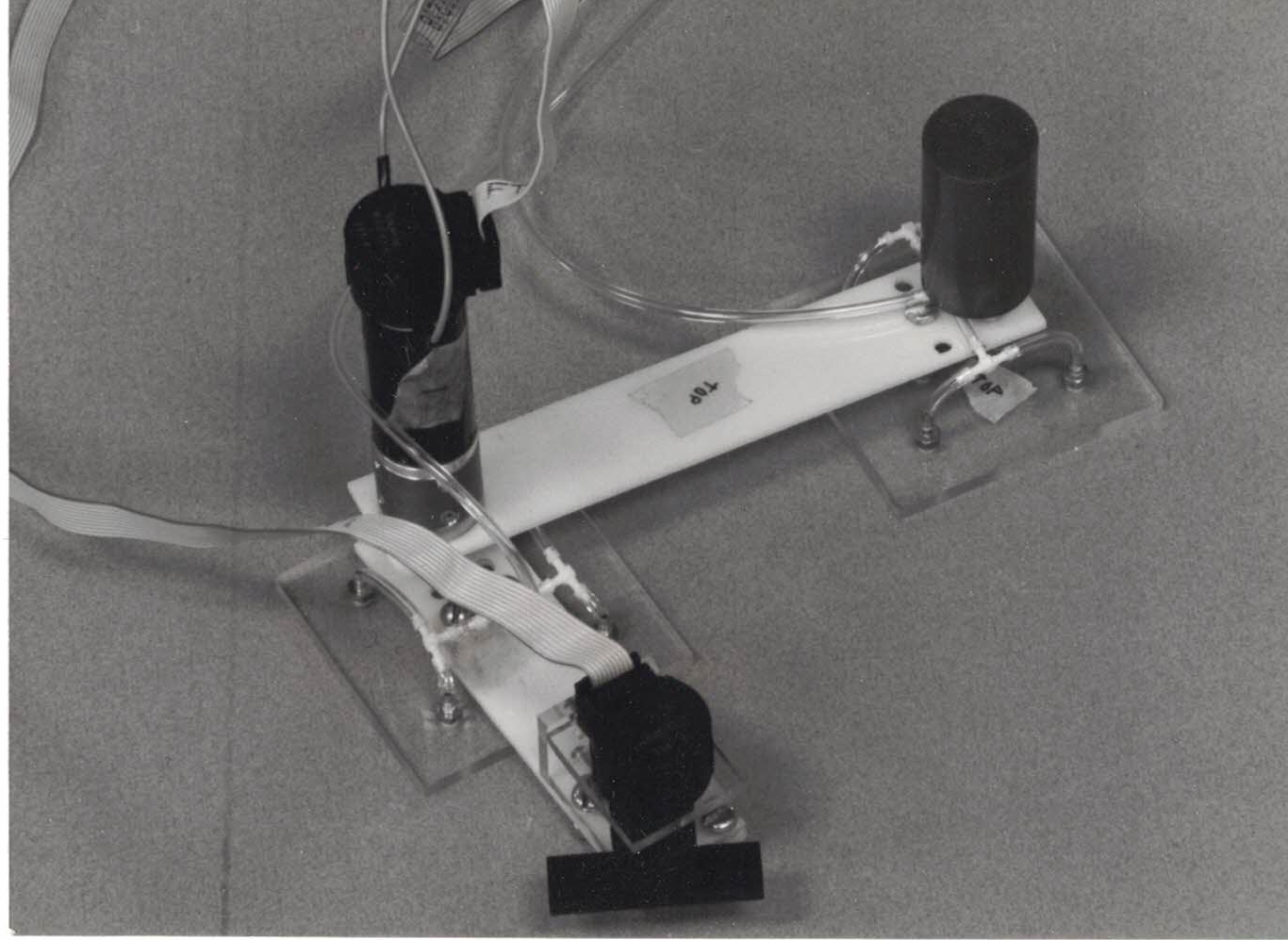
 Tactile sensing of cylinder contact E. Nicolson PhD (1994) |
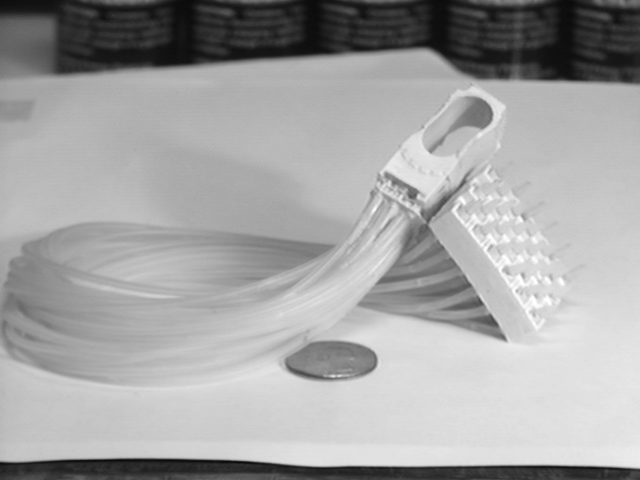
 tactile sensing movie (1987) wmv mp4 construction of capacitive tactile sensor (1993) |
|
Manipulation and Soft Fingers
|
||
 Dexterous Manipulation, etc. from '80s and (mpg) and (mp4) e.g. ICRA 1986 |

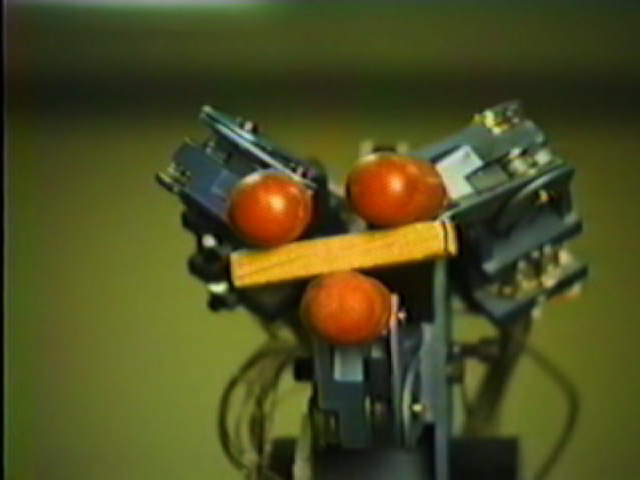
Part rolling (1984) movie e.g. IEEE JRA 1986 and ACC 1984. |
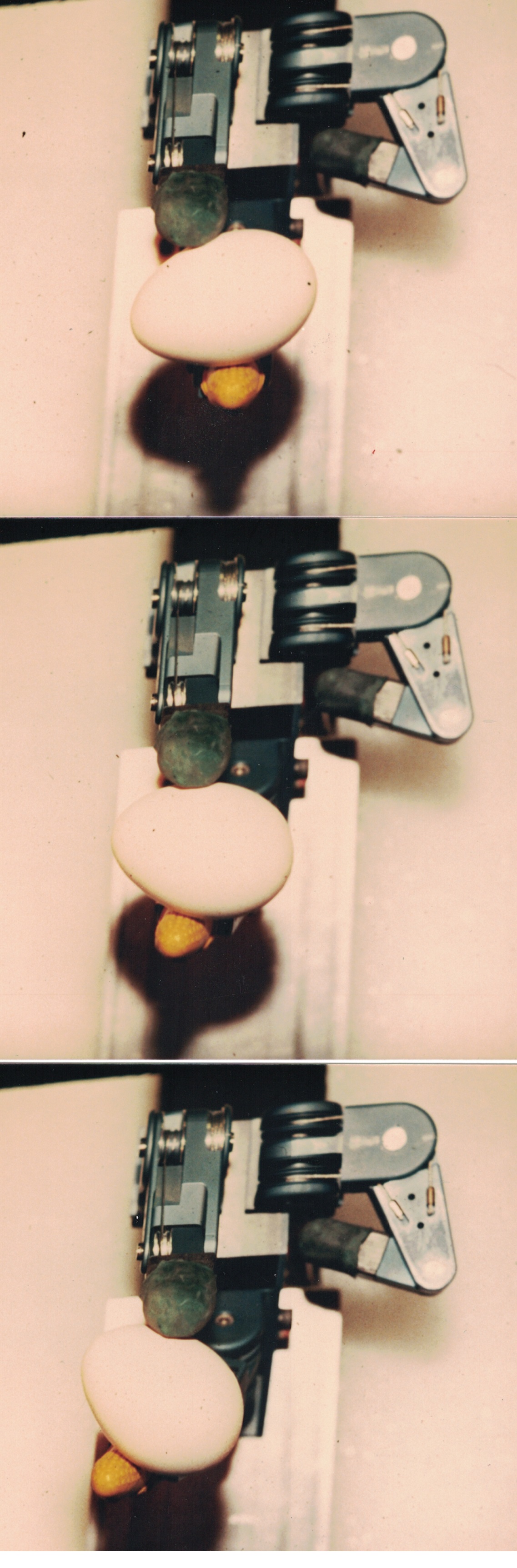
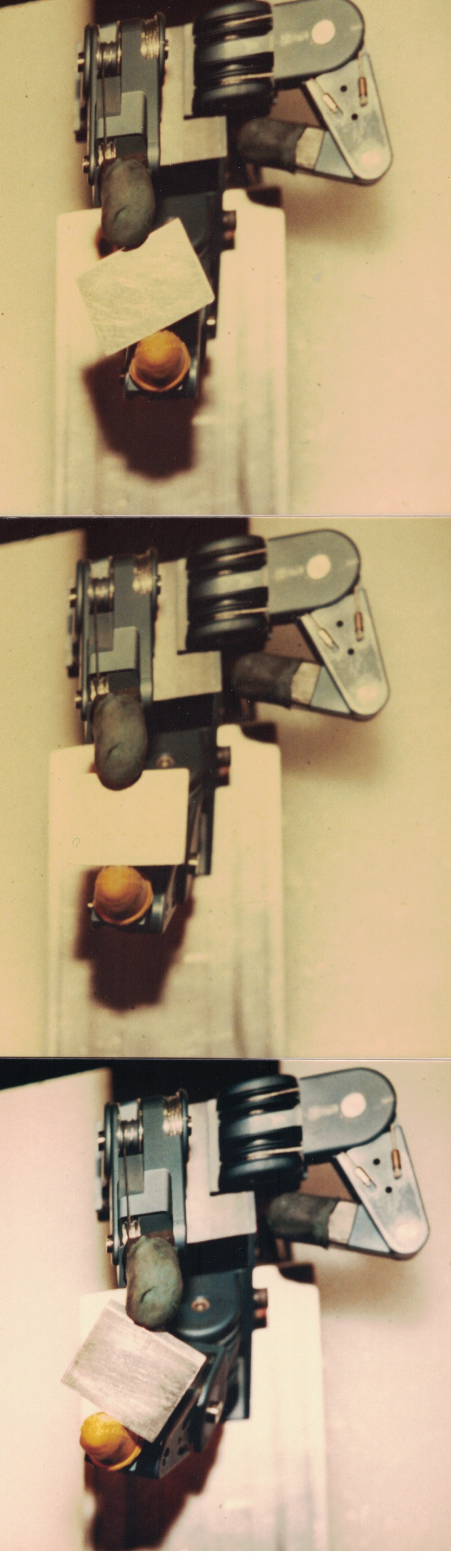
Part rolling (1984) |
 Nut on bolt movie (1991) |
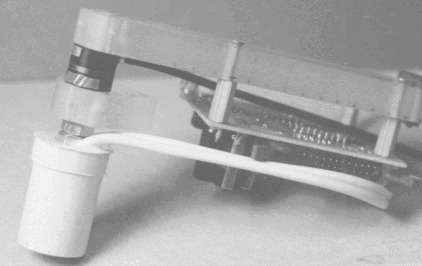
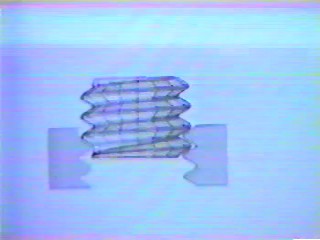
 Soft finger design by Michael Cohn (1991). movie |
|
 Desktop rapid prototyping millirobots (2000-2008) |
 Dextrous manipulation and microassembly movie mpg mp4 Eiji Shimada's microassembly page |
 Manipulation of microparts using force controlled pushing (1998) youtube |
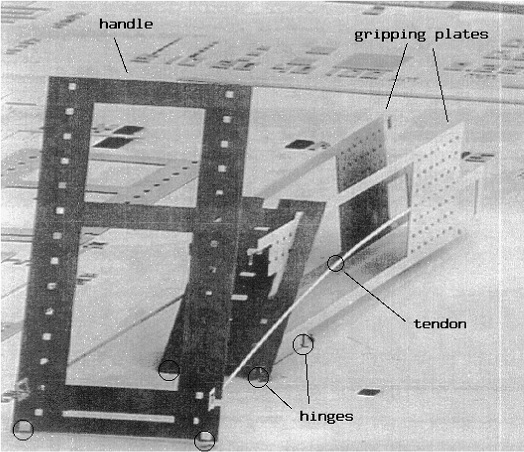 Folded polysilicon microgripper (1991) movie |
 Dynamic modelling of threaded insertion (1991). Video: mp4 |
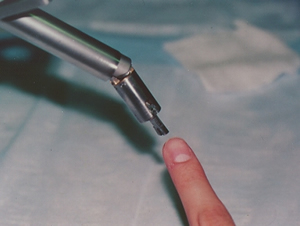 Millirobotics for Minimally-Invasive surgery (1994-2004) |
|
Mobile Robots |
||
 Micromechanical Flying Insect (1998-2008) The goal of this project is to develop an autonomous 0.1 gram flying robot using insect-inspired wing kinematics. Flight mill lift video (2002) (avi) and (mp4) MFI suspended on wire (2003) (mpg) |
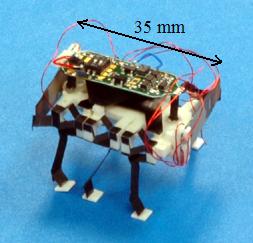 MilliRobot Prototyping using Composite Fiber Toolkits (2000-2007) We developed a low cost (<$1000)) desktop factory which will allow users to build millirobots from a kit of components. |
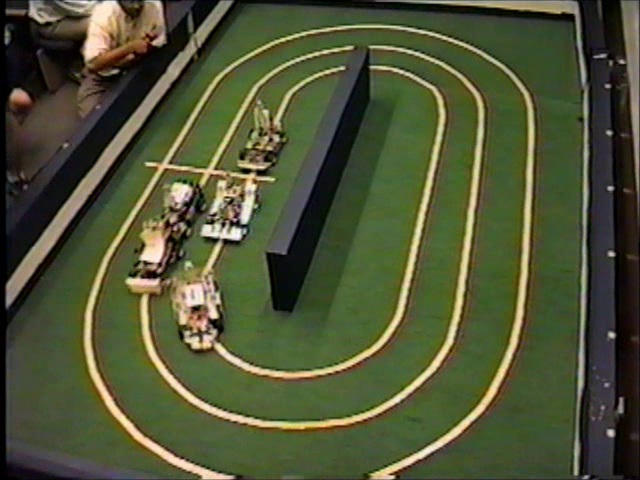 UCB EECS 192 Mechatronics Design Lab (1996) Completely autonomous race cars, using IR beacons for tracking other cars, and optical track following. On-board computation is 8 bit processor (6811). Start signal is given by camera flash. Car with most laps in 2 minutes is the winner. |
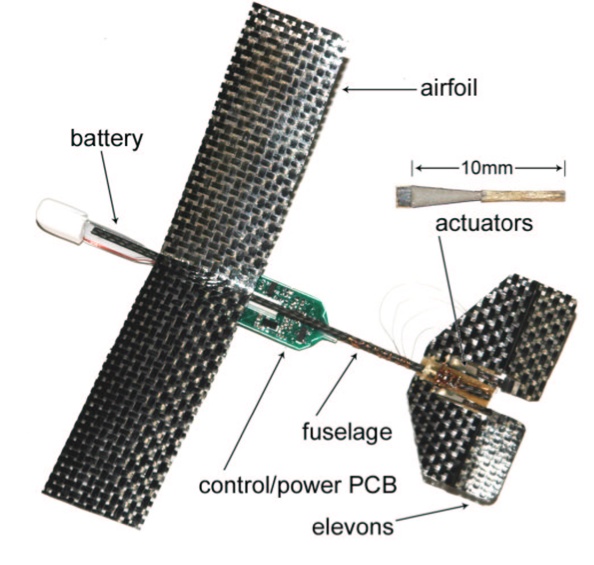 MicroGlider Project (2004-2005) |
 Credit card robot: squeeze film levitated, magnetically driven.(1992) |
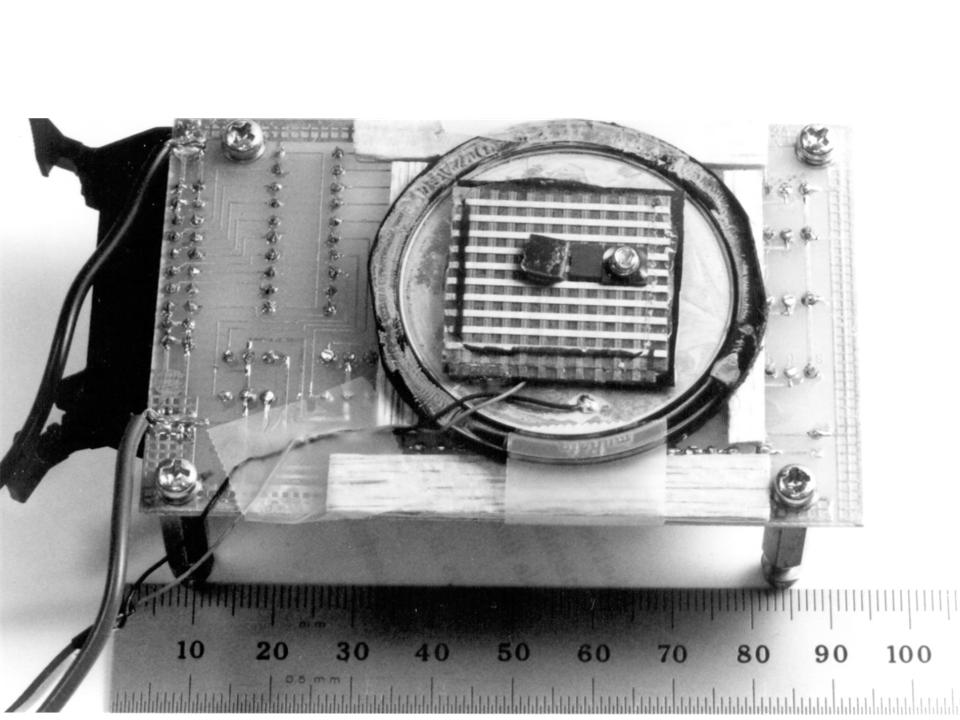 Credit card robot (1995) |
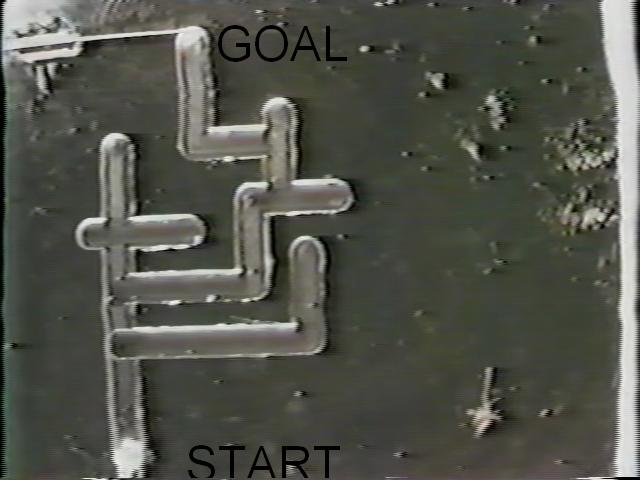 Maze solving by paramecia (1990) movie ,avi |
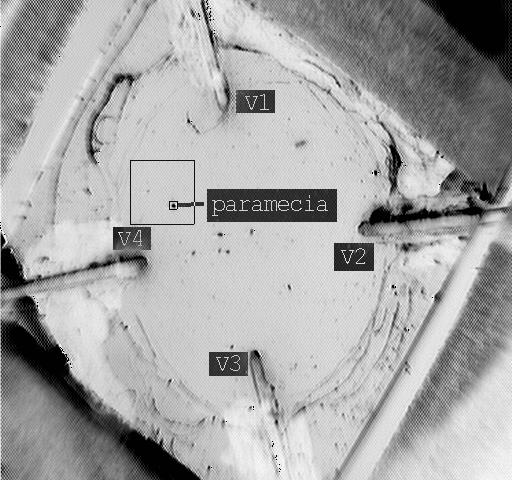 Paramecia Control (1991) movie (avi) and (mp4) |
|
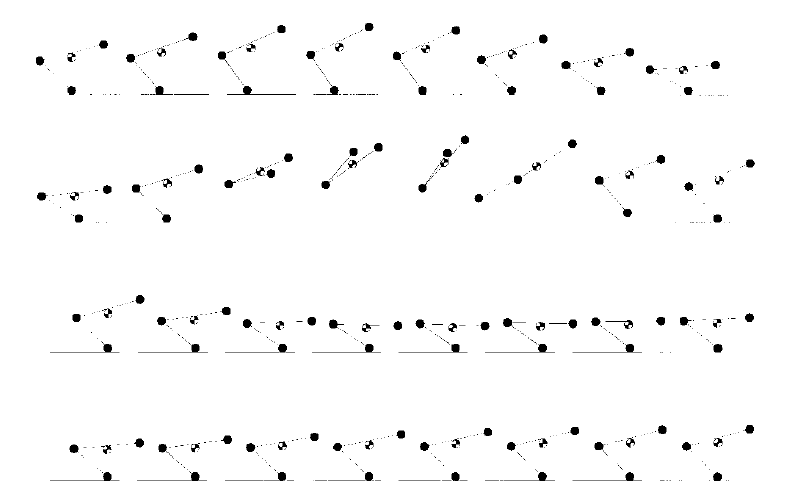 Acrobot hopping (1992) simulation .mp4 |
  Acrobot project 1988-1993. See e.g. ``Control of a Two-Link Robot to Achieve Sliding and Hopping Gaits'', IEEE ICRA 1992. open loop .wmv and sim .wmv |
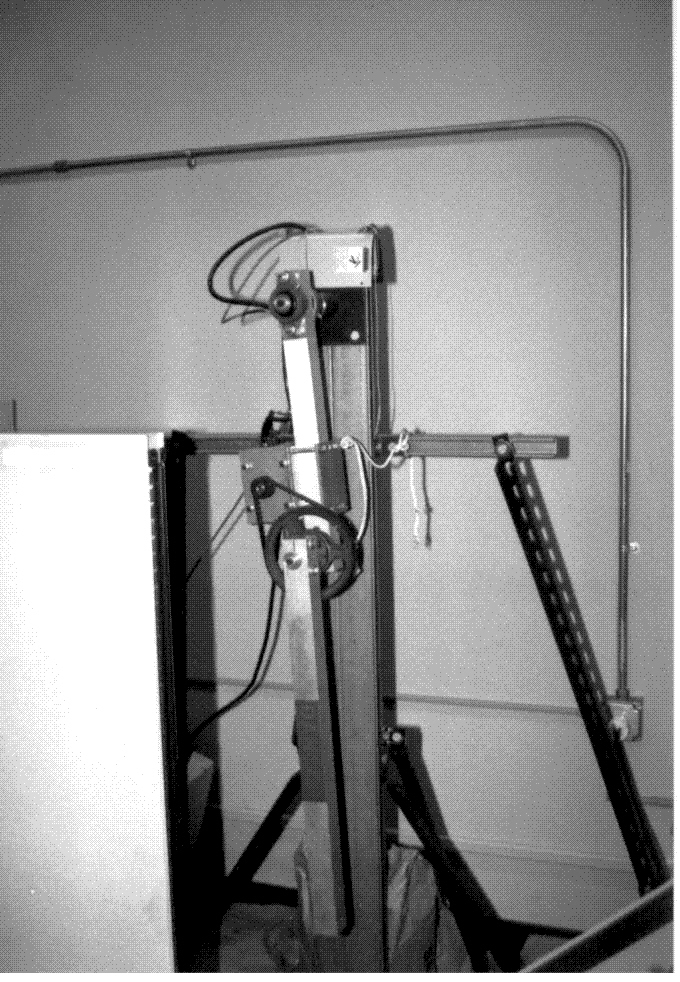
 Acrobot model on air table (circa 1993) |
| |
||