|
Rapid Prototyping of Millirobots Using Composite Fiber Toolkits
|
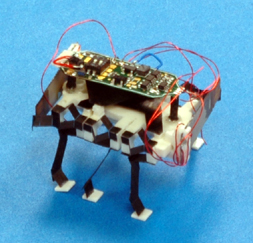
Since we are interested in
developing all kinds of robots on a
millimeter-sized scale, we are currently investigating
methods to rapidly prototype such structures. In this NSF
supported project, we research the
rapid prototyping of millirobots through the use of a kit of
parts.
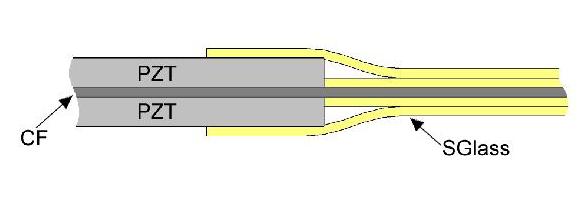
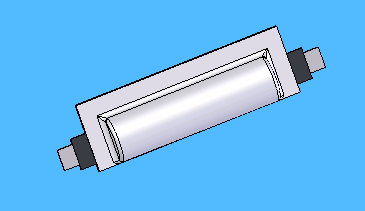
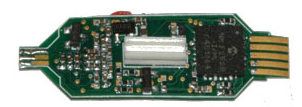
This envisioned
kit of parts would contain
links, joints, sensors,
actuators, integrated wiring, power and control electronics, and
batteries from which a user could put together any number of designs of
fully functional autonomous millirobots.
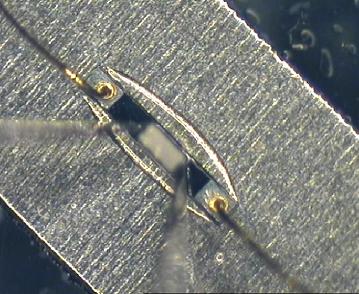
Because the assembly of millimeter-sized parts can be laborious by
hand, another focus of this research is on developing a low cost
assembly tool for automatic assembly of the parts. All of this
work builds on previous work done by our lab in this area of desktop
rapid prototyping millirobots.
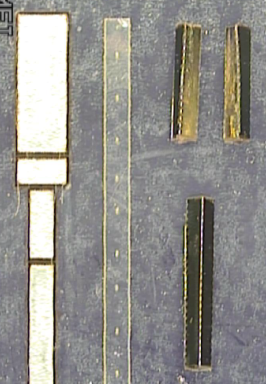
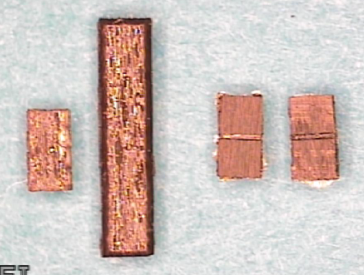
Clicking on the kit parts in the table below
gives more information on their construction or where they might be
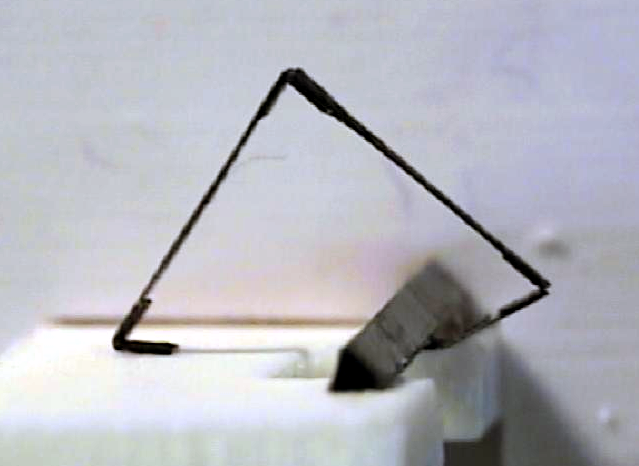
commercially available. The second table provides insight on how
these kit parts could be combined to form some
basic
linkages common in many millirobotic systems
|
 |
This research is sponsored by the NSF DMII Program.
``This material is based upon work supported by the National Science
Foundation under Grant No. DMI-0423153. Any opinions, findings and
conclusions or recommendations expressed in this material are those of
the author(s) and do not necessarily reflect the views of the National
Science Foundation (NSF).''
|