Control of a Micro-Organism as a Prototype Micro-Robot
Mobile devices built on a sub-millimeter scale working in
a fluid medium could be useful
for manipulation and testing of small biological or electrical
components. Complete self-powered mobile systems on this scale already
exist,
in the form of simple single-celled animals.
By applying external control signals, trajectories of these animals
can be specified.
Protozooans such as Paramecium provide a good example mechanism
to begin exploring issues of
control, sensing and planning for this environment and size.
Path planning using an electric potential has been used
to allow these mobile devices to solve a simple maze, using only
intrinsic behavior.
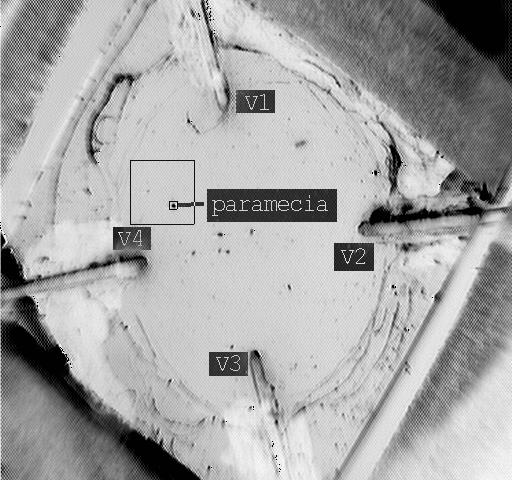
Using visual sensing of device position,
primitive closed-loop trajectory following in the plane has been shown.
Based on simple mechanical models [Roberts, 1970],
force and velocity limitations for these devices
can be estimated.
Trajectory following for a square path using proportional
steering
control
Since only the paramecium direction but not the velocity
is controllable, the typical oscillatory response of a non-holonomic
system using smooth controls is seen. Coordinates in pixel units:
1 pixel = 50 microns. Start location is at about (225, 160).
Commanded velocity: 400 micron per second. Position gain : 1.2 V per
mm.
Electrode spacing 13 mm.
A brief excerpt of closed loop control.
click here. (MPEG, 6288K)
Reference
R.S. Fearing,
``Control of a Micro-Organism as a Prototype Micro-Robot'',
2nd Int. Symp. on Micromachines and Human Sciences, Nagoya,
Japan,
Oct. 8-9, 1991. 4.8 MB scanned pdf
Please also see the recent work of Prof. A. Itoh on control of
paramecia.
A. Itoh, ``Motion control of protozoa for bio MEMS,''
IEEE/ASME Trans. on Mechatronics, vol. 5, no. 2, pp. 181, June 2000.