Biomimetic Millisystems Lab Youtube channel
New Results
|
MRI Compatible Series Elastic Actuator Module
(17 February 2026)
We designed a novel MRI-compatible rotary series elastic actuator (SEA) module that employs velocity-sourced ultrasonic motors for force-controlled operation within MRI scanners. Experimental validation confirms effective torque control in both 3 Tesla MRI and non-MRI settings, achieving a 5% settling time of 0.05 s and steady-state error within 2.5% of the actuator’s maximum output torque. Design and Control of a Compact Series Elastic Actuator Module for Robots in MRI Scanners. |
 |
|
|
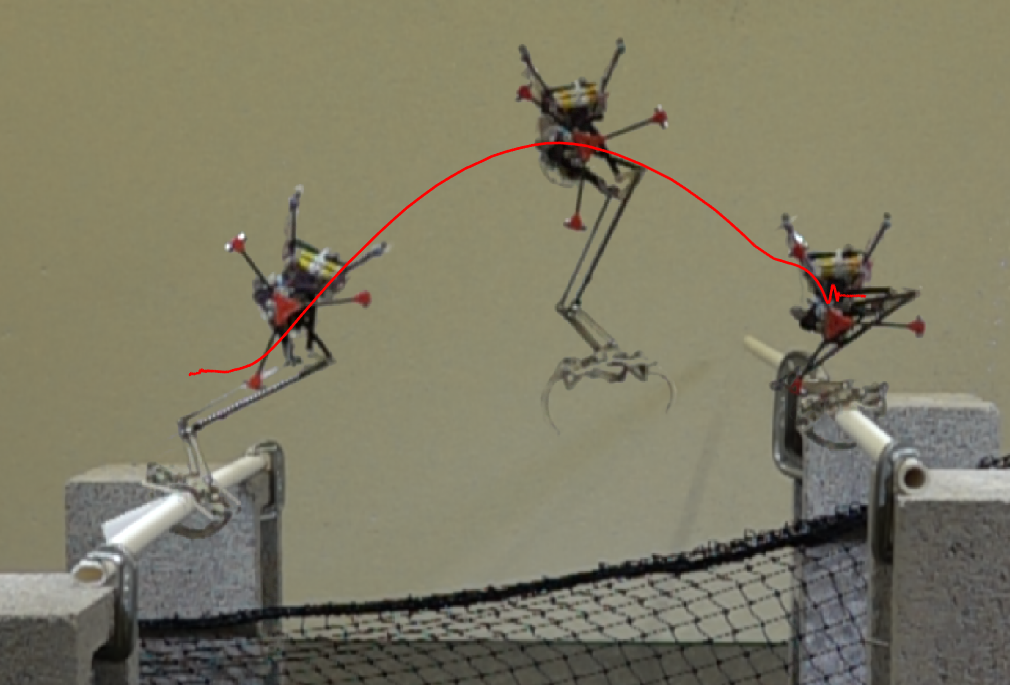
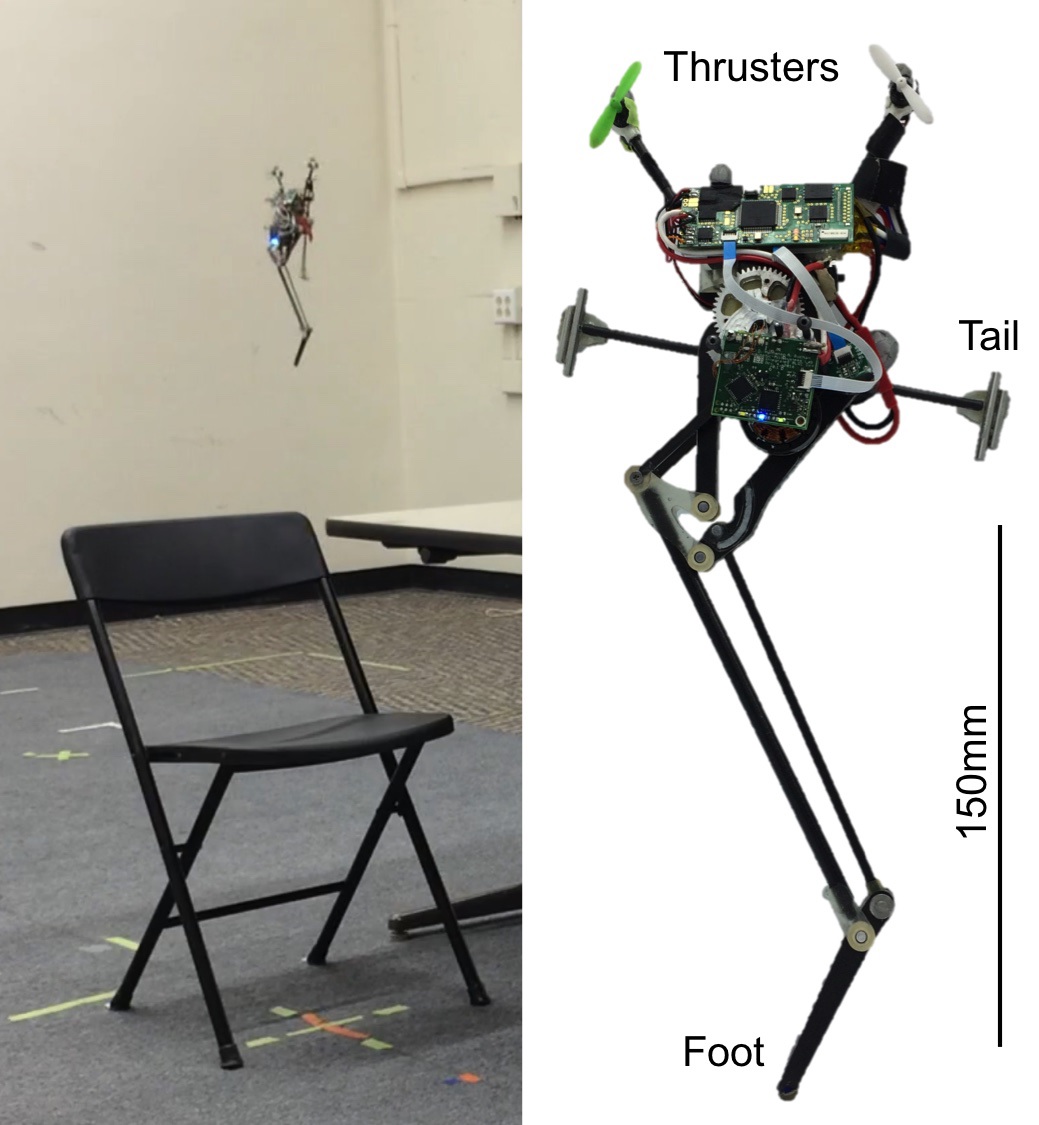
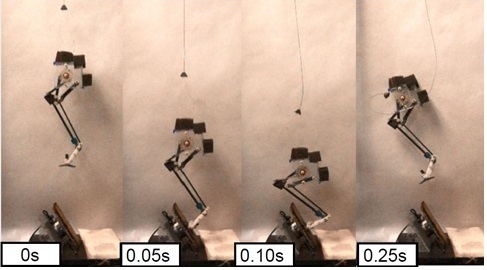
Monopedal robot branch-to-branch leaping and landing inspired by squirrel balance control
(19 March 2025)
We hypothesized that leg length control to enhance branch reaction control authority would markedly expand the range of successful landing conditions. With this balance strategy, Salto-1P demonstrates branch-to-branch leaps, including upright balanced landings, despite negligible grasping torque. Science Robotics DOI: 10.1126/scirobotics.adq1949 |
 |
|
|
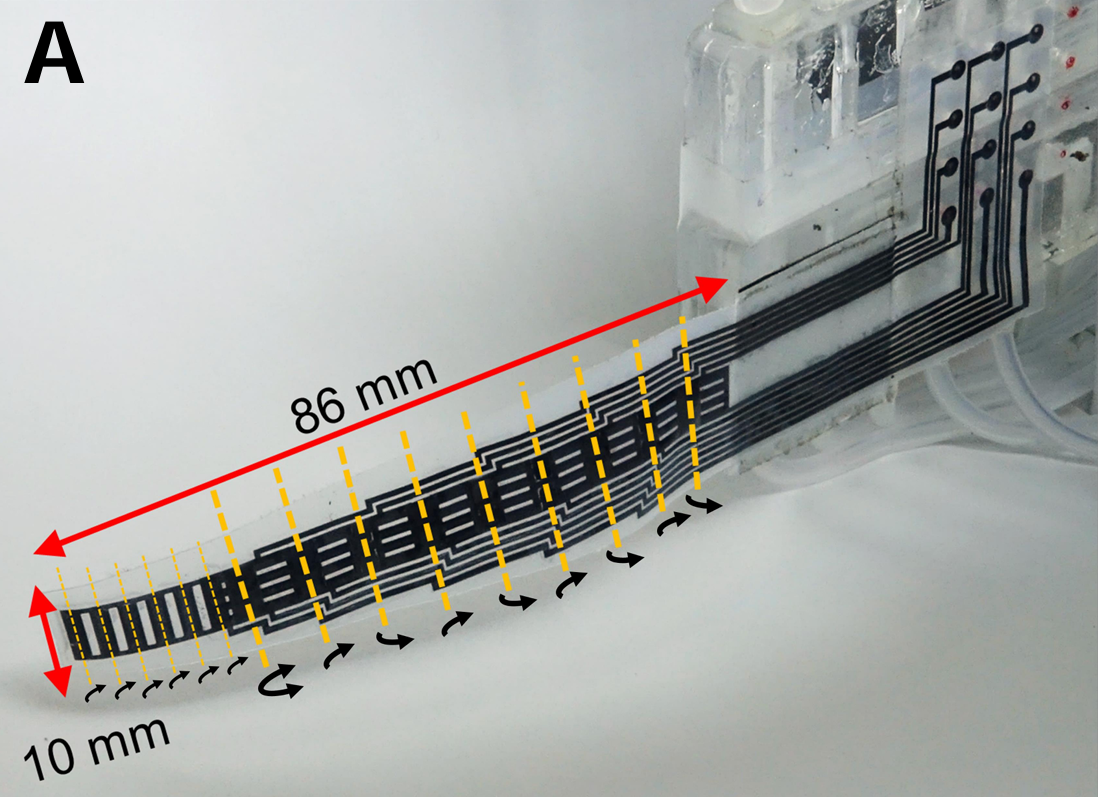
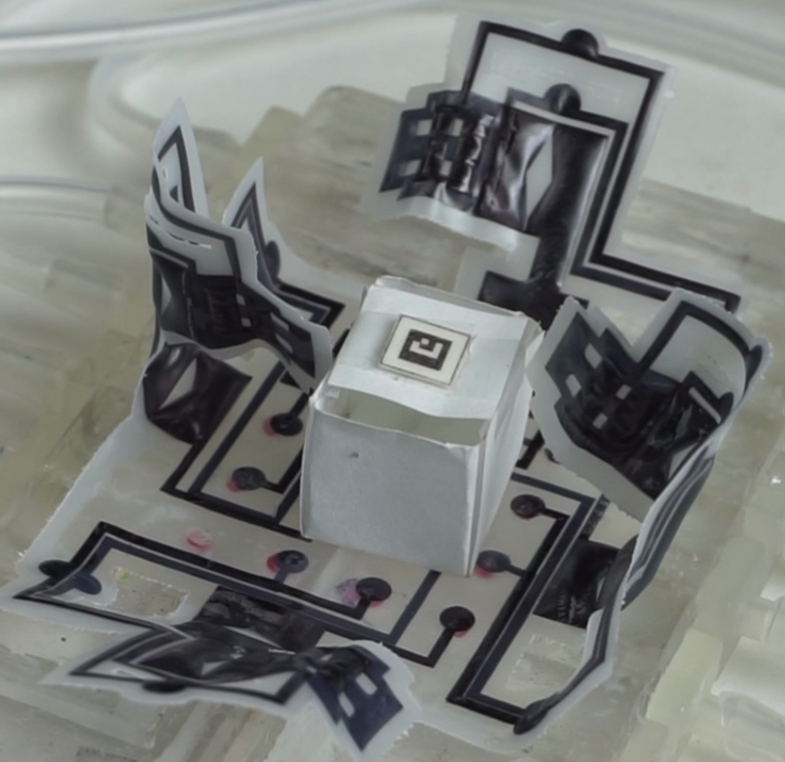
Multi-Layer Pouch Robots with Inkjet Masking Layers
(Oct. 2024)
A new monolithic prototype fabrication method utilizes inkjet printing of a masking ink layer, which prevents film bonding and thus defines inflatable regions. Multi-layer inflatable pouches of any planar geometry can be created using thermal fusing, with inter-layer connections and a minimum feature resolution of 0.3 mm. The multi-layer fabrication process enables the integration of pouches for bending actuation and structure, pneumatic channels, and external port connections. This high level of integration enables the fabrication of pouch robots with many independent DoFs, such as an planar manipulator with 10 independent DoFs. Y. You, C. Dai, E. Goldschmidt, and R.S. Fearing, Advanced Materials Technologies, 2024, 2401052. pouch hand: video Fabrication overview video |
  |
 |
|
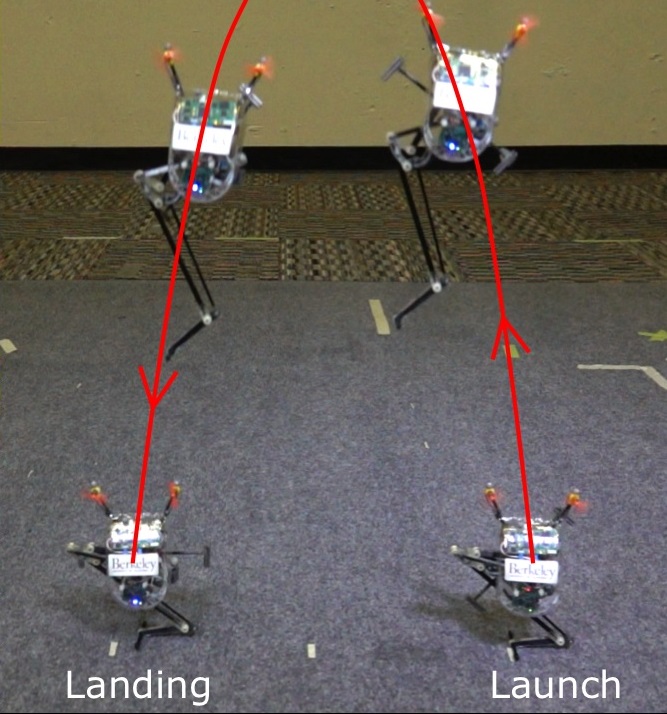
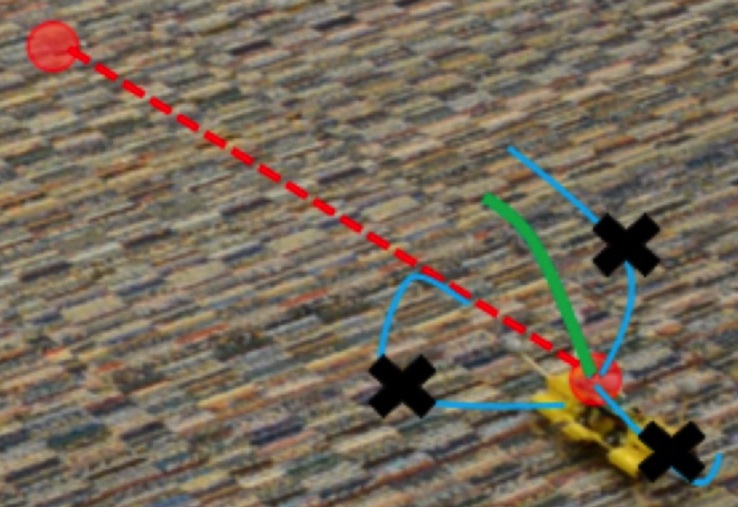
Precision Robotic Leaping and Landing Using Stance-phase Balance
(May 2020)
We demonstrate targeted leaping as well as balanced landing on a narrow foot with Salto-1P. Accurate and reliable leaping and landing are achieved by the combination of stance-phase balance control based on angular momentum, a launch trajectory that stabilizes the robot at a desired launch angle, and an approximate expression for selecting touchdown angle before landing. J.K. Yim, B.R.P. Singh, E.K. Wang, R. Featherstone and R.S. Fearing, IEEE Robotics and Automation Letters, 2020 video: (youtube) |
 | |
|
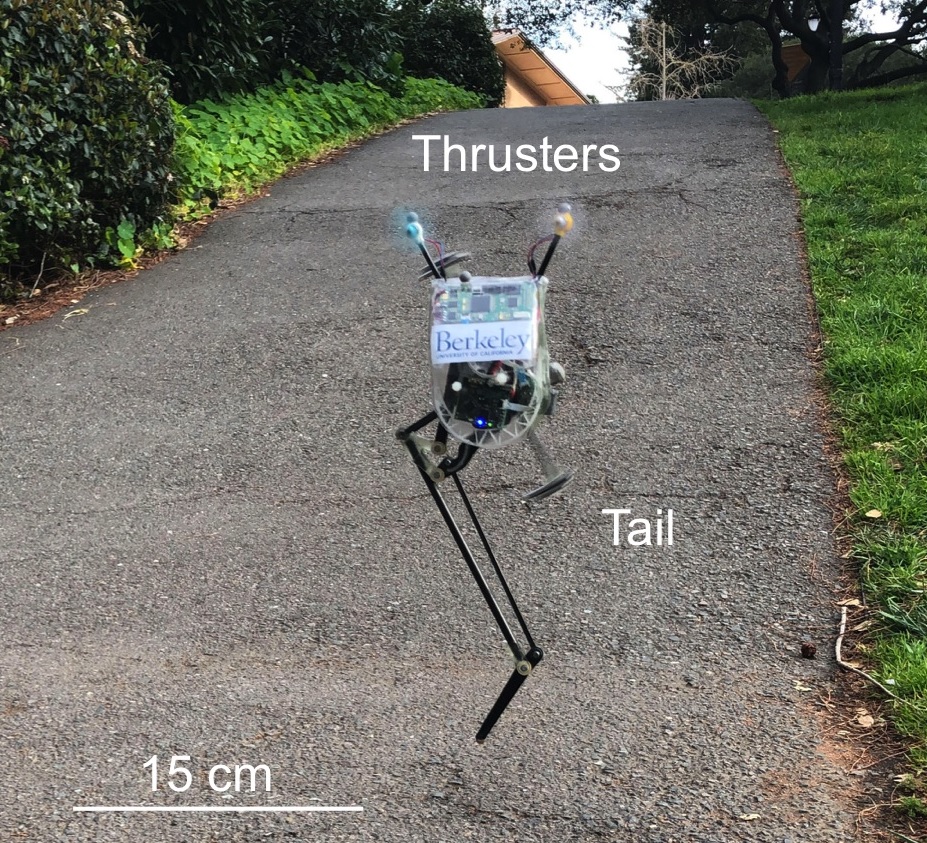
Drift-Free Roll and Pitch Estimation for High-Acceleration Hopping
(May 2019)
Jumping robot SALTO estimates its own attitude, so it can jump outside the motion capture lab for the first time! Justin K. Yim, Eric K. Wang, and R.S. Fearing, (ICRA 2019) and video from UCB News: movie , video from ICRA19: movie . Congratulations to Justin and Eric for Best Student Paper Award! |
 | |
|
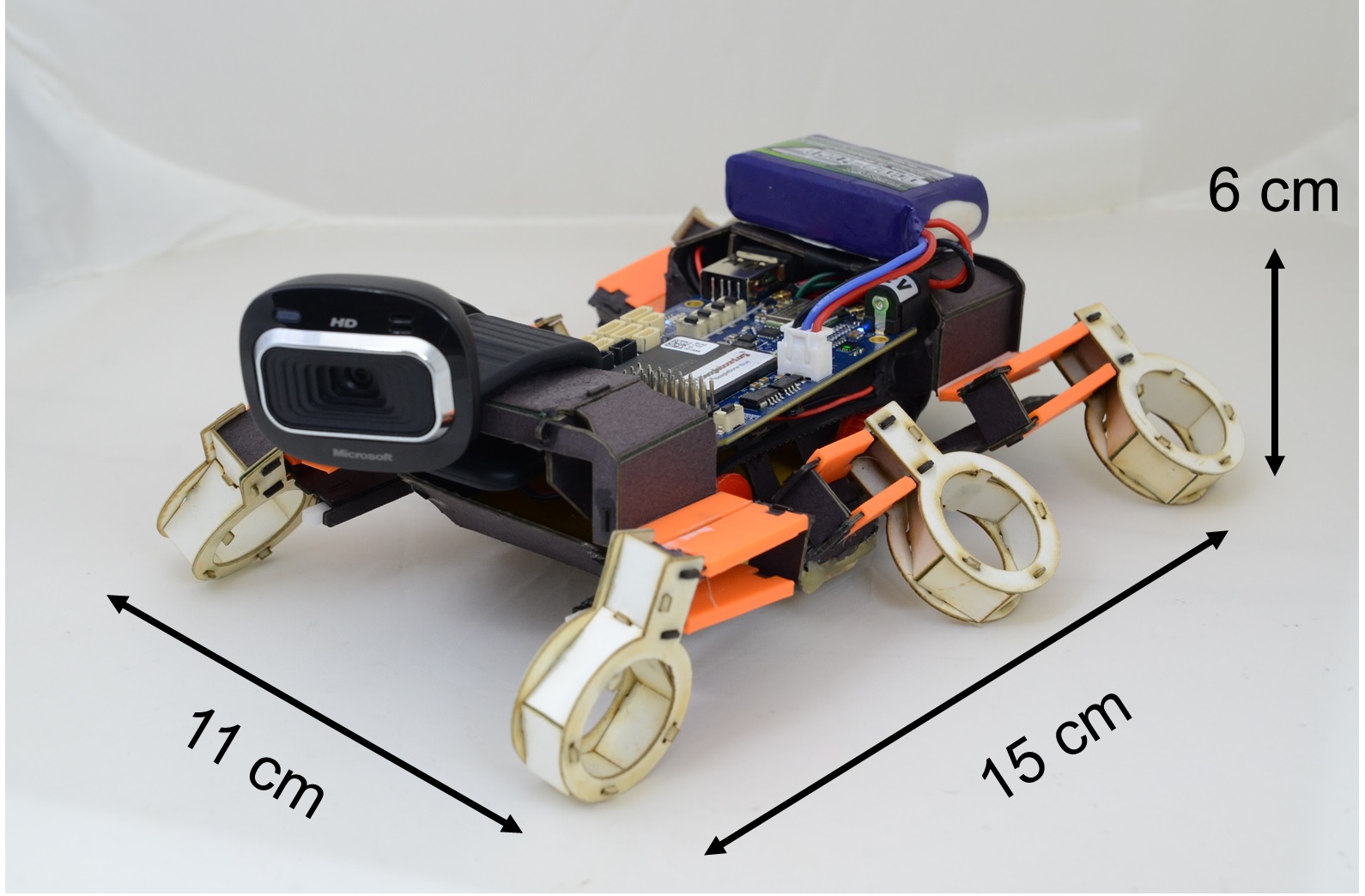
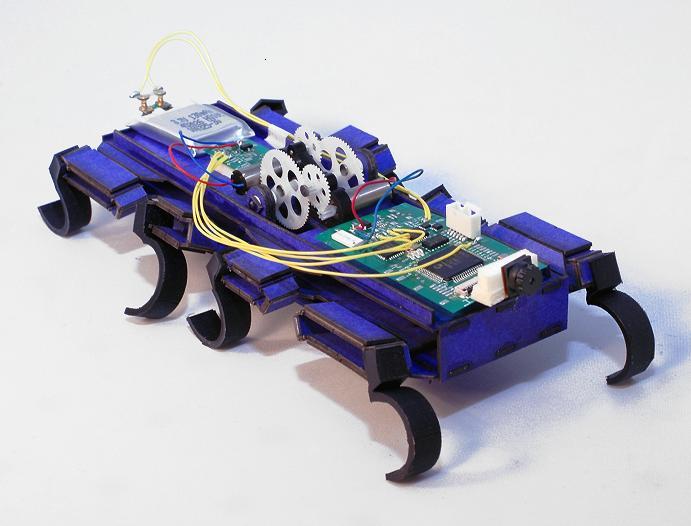
OpenRoACH: A Durable Open-Source Hexapedal Platform with
Onboard Robot Operating System (ROS)
(May 2019)
OpenRoACH is a 15-cm 200-gram self-contained hexapedal robot. The robot is fully open sourced, can be fabricated with benchtop fast- prototyping machines such as a laser cutter and a 3D printer, and can be assembled by one person within two hours. L. Wang, Y. Yang, G. Correa, K. Karydis, R. S. Fearing (ICRA 2019) and CAD files, BoM, code |
 | |
|
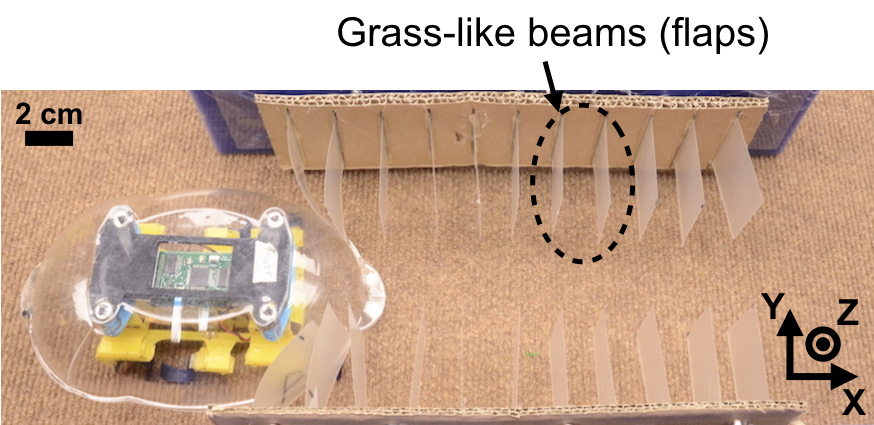
Body Lift and Drag for a Legged Millirobot in Compliant Beam Environment
(May 2019)
Experiments with a tactile sensing shell on VelociRoACH measured lift and drag forces while moving through simulated grass. A shell-shape which reduces drag but increases negative lift, such as the half-ellipsoid used, is suggested to be advantageous for robot locomotion in this type of environment. Can Koc, Cem Koc, Brian Su, C.S. Casarez and R.S. Fearing (ICRA 2019) |
 | |
|
Precision Jumping Limits in Salto-1P from Flight-phase Control
(Oct. 2018)
We developed a deadbeat foot placement hopping controller for an untethered monopedal robot, Salto-1P. The robot demonstrated precise foot placement even on trajectories with aggressive changes in speed, direction, and height: in a random walk, its error standard deviation was 0.10 m. Foot placement precision is tightly limited by attitude control accuracy, requiring attitude error less than 0.7 degrees for some tasks. Justin K. Yim and R.S. Fearing, (IROS 2018) and movie . |
 | |
|
Steering of an Underactuated Legged Robot through Terrain Contact
with an Active Tail
(Oct. 2018)
Two novel turning strategies using tail contact are explored. Tail drag turning provides comparable turning maneuverability to differential drive turning gaits on carpet and gravel surfaces. Tail impact turning can produce rapid point turns on carpet, tarp, and gravel, but has a large variability in turn angle and time to recover from the turn. C.S. Casarez and R.S. Fearing (IROS 2018) and movie . |
 | |
|
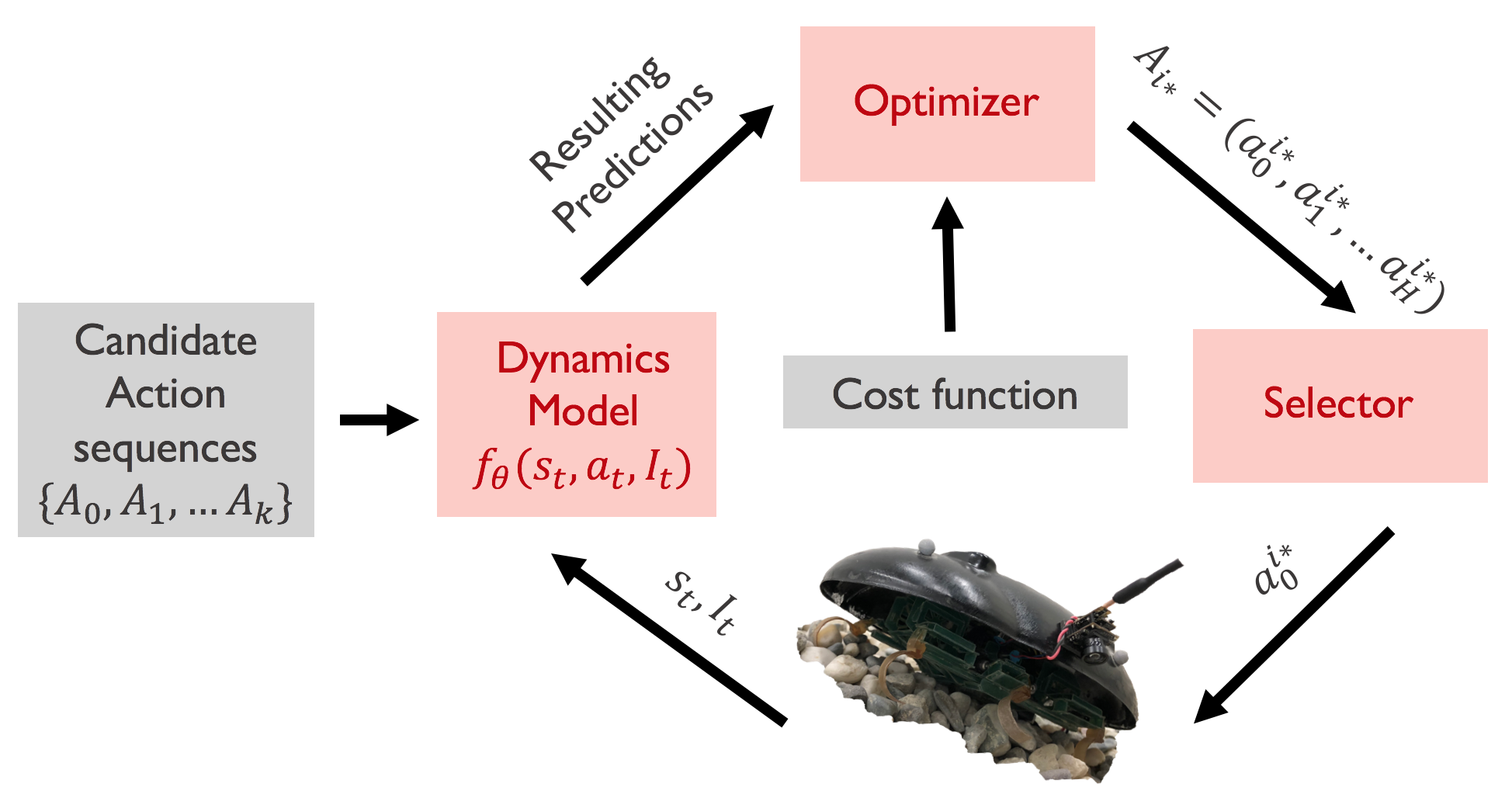
Learning Image-Conditioned Dynamics Models
for Control of Underactuated Legged Millirobots (Oct. 2018)
(Oct. 2018)
We present an approach for controlling a millirobot based on learned neural network models. Using less than 17 minutes of data, a predictive model of the robot's dynamics can be learned that enables synthesis of effective gaits for steering on specified terrain such as grass, styrofoam, or gravel. A. Nagabandi, G. Yang, T. Asmar, R. Pandya, G. Kahn, S. Levine, R.S. Fearing (IROS 2018) |
 | |
|
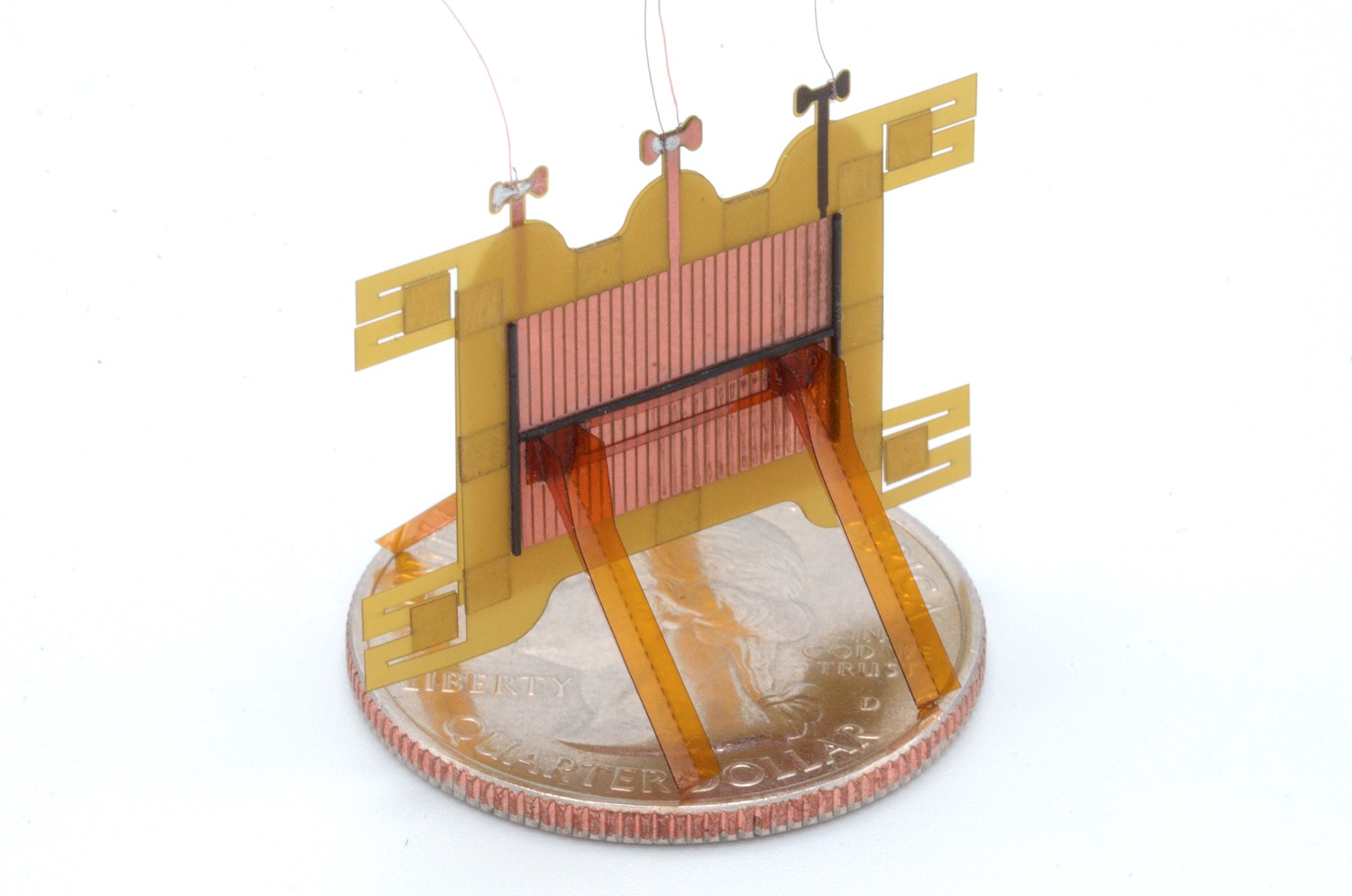
Bidirectional, repulsive-/attractive-force
electrostatic actuators for a crawling milli-robot
(July 2018)
RAFA is a new thin-film electrostatic actuator which generates electrostatic pressures up to 156 Pa in repulsion and 352 Pa in attraction when operating at 0 to 1.2 kV. RAFAR, a 132 mg tethered milli-robot, crawls at 0.32 mm/s with anisotropic friction feet. E.W. Schaler, L. Jiang, C.Lee, and R.S.Fearing, (MARSS 2018) and movie . Congratulations to Ethan, Loren, and Caitlyn for Best Student Paper Award! |
 | |
|
RSS 2018 Workshop on Design and Control of Small Legged Robots
(June 30, 2018)
RSS 2018 Workshop Web Page | ||
|
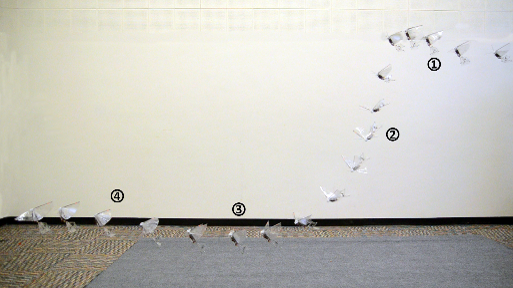
Self-Engaging Spined Gripper with Dynamic Penetration and Release
for Steep Jumps
(May 2018)
A self-engaging gripper with spines was designed for a monopedal jumping robot, to reduce slip and provide adhesion. The mechanism is kinematically constrained to engage/disengage with leg crouch/extension. The gripper enables jumping of a passive test structure on penetrable inclines up to 60 degrees. J.S. Lee*, M. Plecnik*, J. Yang, and R.S. Fearing, (ICRA 2018) and video |
 | |
|
Neural Network Dynamics Models for Control of Under-actuated Legged Millirobots
(Sep. 2017) We present a learning based approach in which a model of the dynamics is learned from data gathered by the millirobot, and that data is then leveraged by an MPC controller. We show that with 17 minutes of random data collected with the VelociRoACH millirobot, the VelociRoACH can accurately follow trajectories at higher speeds and on more difficult terrains than a differential drive controller. A Nagabandi, G Yang, T Asmar, G Kahn, S Levine, R Fearing arXiv:1711.05253 and BAIR blog post |
 |
|
|
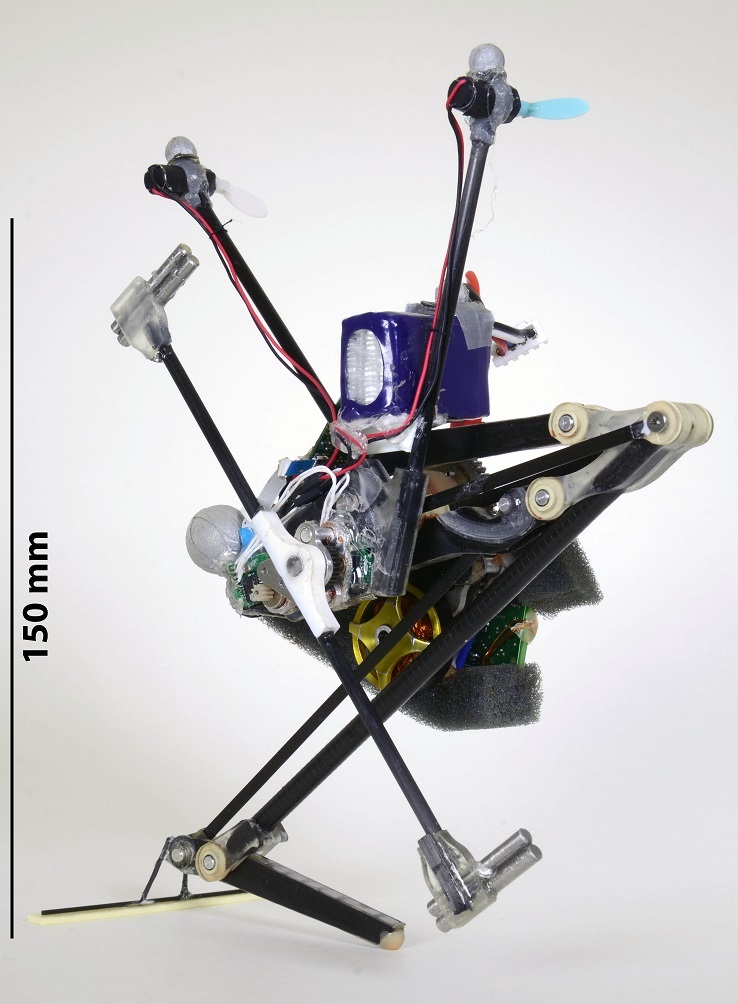
Repetitive extreme-acceleration (14-g) spatial jumping with Salto-1P
(Sep. 2017) Salto-1P uses aerodynamic thrusters and an inertial tail to control its attitude in the air. We present studies of extreme jumping locomotion in which the robot spends just 7.7% of its time on the ground, experiencing accelerations of 14 times earth gravity in its stance phase. D.W. Haldane, J.K. Yim, and R.S. Fearing, (IEEE IROS 2017) and video. Congratulations to Duncan and Justin for IROS 2017 Best Paper Award! |
|
|
|
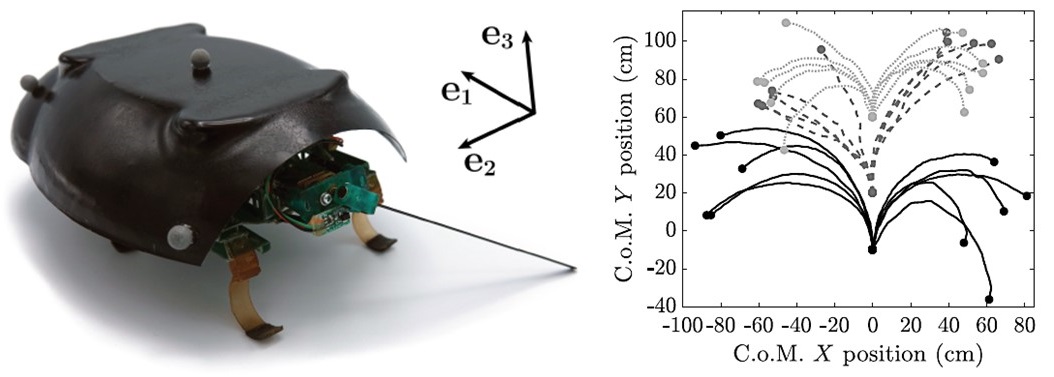
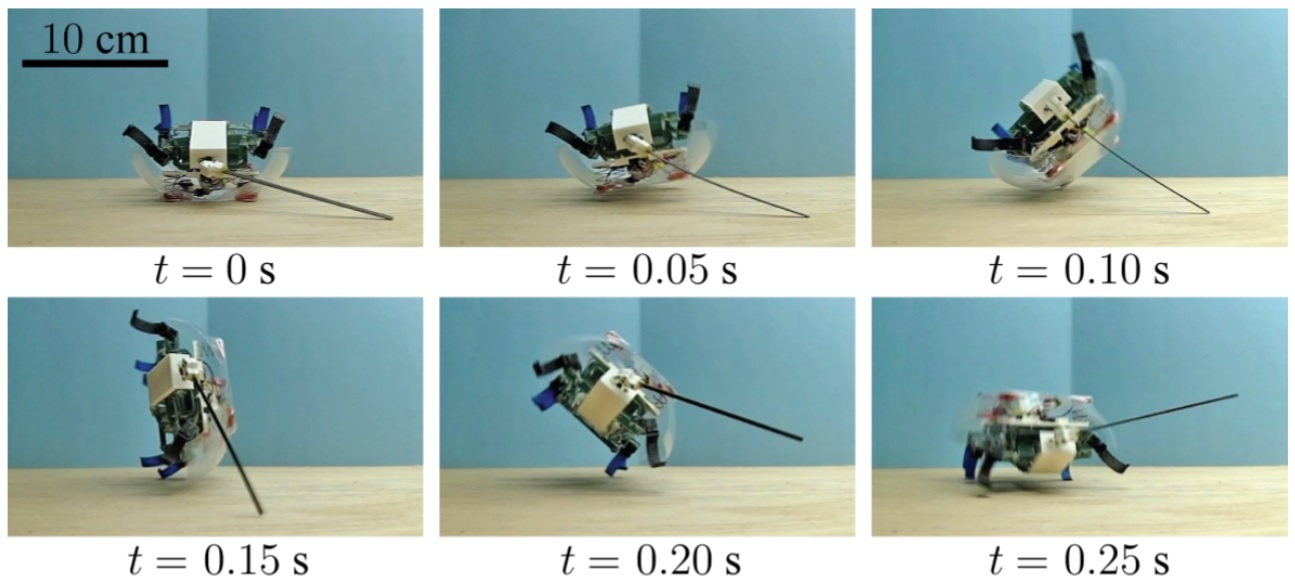
Dynamic Terrestrial Self-Righting with a Minimal Tail
(Sep. 2017) A single degree of freedom tail gives VelociRoACH the capability to dynamically self-right. Open-loop experiments on terrain with varying friction and roughness show that VelociRoACH can dynamically self-right in just 256 ms. C. Casarez and R.S. Fearing, (IEEE IROS 2017) and video. |
 |
|
|
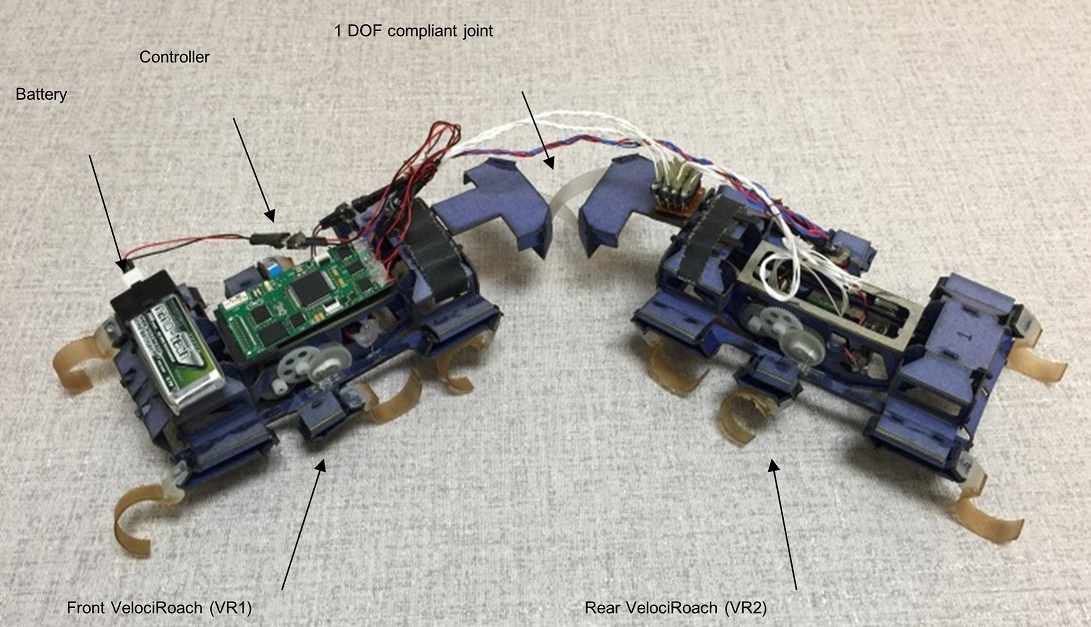
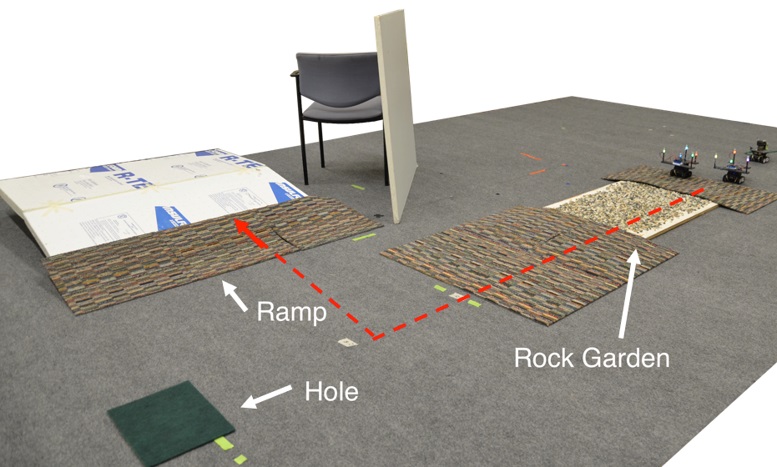
High-rate turning using dual VelociRoACHes
(May 2017) By connecting 2 robots by a compliant joint, the front robot determines the direction of steering and the rear robot generates thrust for high-rate turning. Closed loop steering using an on-board gyro is used to track a predefined path. T. Seo, C.S. Casarez and R.S. Fearing, (IEEE ICRA 2017) and video |
 |
|
|
Cooperative Inchworm Localization
(May. 2017) A team movement strategy, referred to as inchworm, uses picket robots which move ahead of the observer and act as temporary landmarks for the observer to follow. This cooperative approach employs a single Extended Kalman Filter (EKF) to localize the entire heterogeneous multi-robot team. B. Nemsick, et al. (IEEE ICRA 2017) and video |
 |
|
|
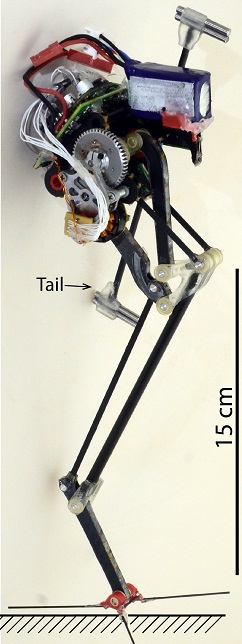
Salto: Saltatorial Agile Locomotion on Terrain Obstacles
(Dec.
2016) Through use of a specialized leg mechanism designed to enhance power modulation, we constructed a jumping robot that achieved 78% of the vertical jumping agility of a galago. D.W. Haldane, M.M. Plecnik, J.K. Yim, and R.S. Fearing, Science Robotics Dec. 2016 overview video and jumps |
|
|
|
Modeling and Control of an Ornithopter for Diving
(Oct. 2016)
We identify piece-wise affine linear models for diving maneuvers in flapping winged flight. These models are used to compute the reachability sets that satisfy recovery conditions for safe diving. The point within the dive to begin recovery was determined by checking the current pose for inclusion in the backward reachable set. 2.2 meter dives were achieved at a success rate of 60 percent. Rose et al. (IEEE/RSJ IROS Oct. 2016) and movie |
| |
|
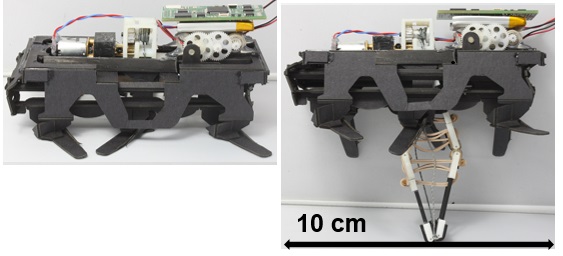
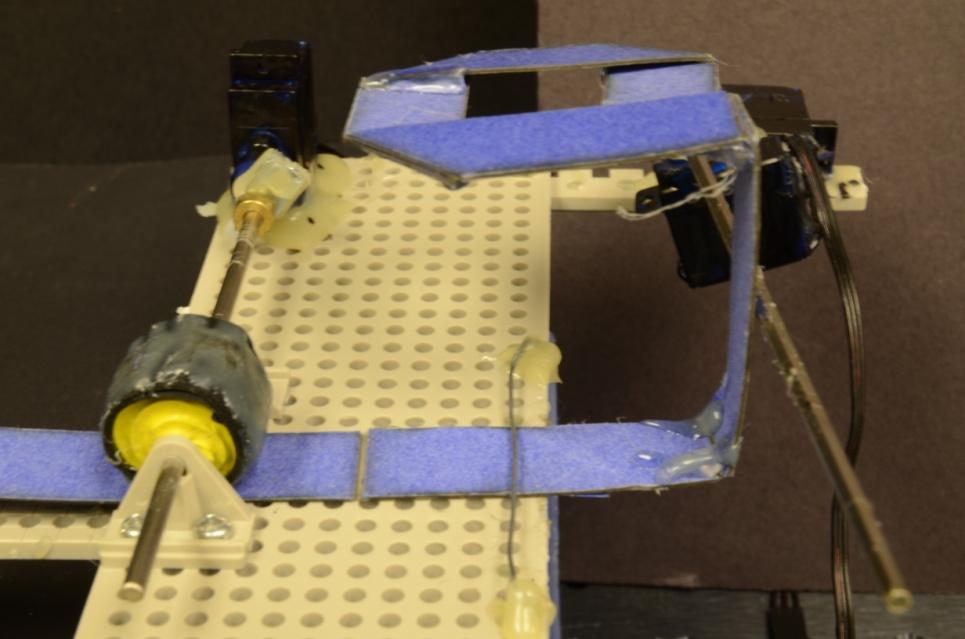
Compound Foot for Increased Millirobot Jumping Ability
(Sep.
2016) Bio-inspired compound feet with spines and foot pads improved a millirobot's jumping performance by 65%, bringing it close to a no-slip model. J.S. Lee, R.S. Fearing, and K-J. Cho, CLAWAR Sep. 2016 flea jump video |
 |
|
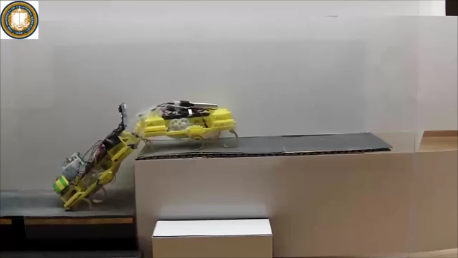
| Integrated
Jumping-Crawling Robot using Jumping Module (May.
2016) A jumping module attached to a small hexapedal crawler allows controlled jumps of up to 2 meters height, while the robot is capable of forward running. G-P. Jung, C. Casarez, S-P. Jung, R.S. Fearing, and K-J. Cho (IEEE ICRA 2016) and video SNU youtube |
 |
|
| Robotic
Folding of Ribbon Structures (May.
2016) We propose the concept of robotic ribbon folding for automatic fabrication of robot structures. We demonstrate robotic ribbon folding into 2D and 3D static structures, and planar kinematic linkages such as a simple non-crossing four-bar mechanism. L. Wang, M.M. Plecnik, and R.S. Fearing, IEEE ICRA 2016. |
 |
|
| Step
Climbing Cooperation Primitives
(May. 2016) We developed primitives using quasi-static force analysis to enable a pair of underactuated millirobots to cooperatively climb a step. A tension controlled tether provides a necessary additional degree of freedom. C. Casarez and R. Fearing, (IEEE ICRA 2016) and video. |
 |
Previous News (2015 and earlier)
Current Research Projects
| Ambulating Robots The goal of this work is to develop high performance ambulating milli-robots using minimal actuation and passive stabilization mechanisms, combined with onboard high level control. |
 |
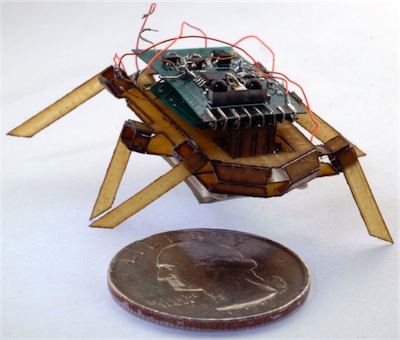
| Folding
Prototyping of Meso- and Milli- Robots Using laser cutting of composite materials, we rapidly prototype small scale robots using flexure technology. Example structures with dozens of joints have been constructed. (Shown is autonomous miniRoACH from 2008.) |
 |
Past Research Projects
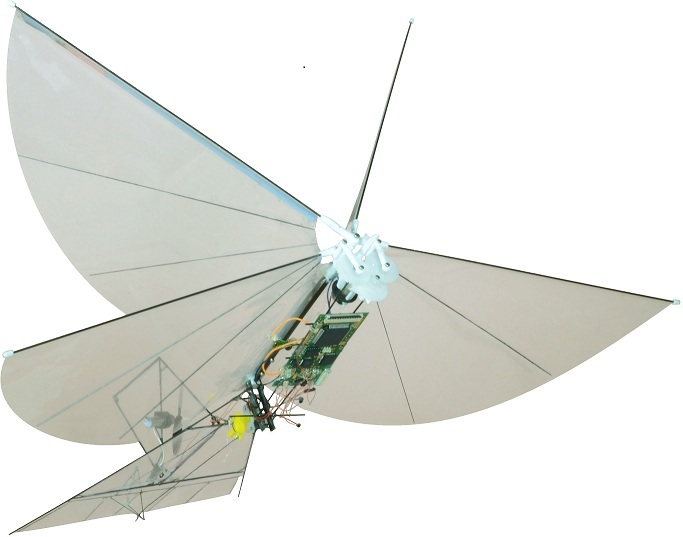
| Ornithopter
Project Bioinspired sensors and control strategies are being developed for coordinated flight of multiple ornithopters. |
 |
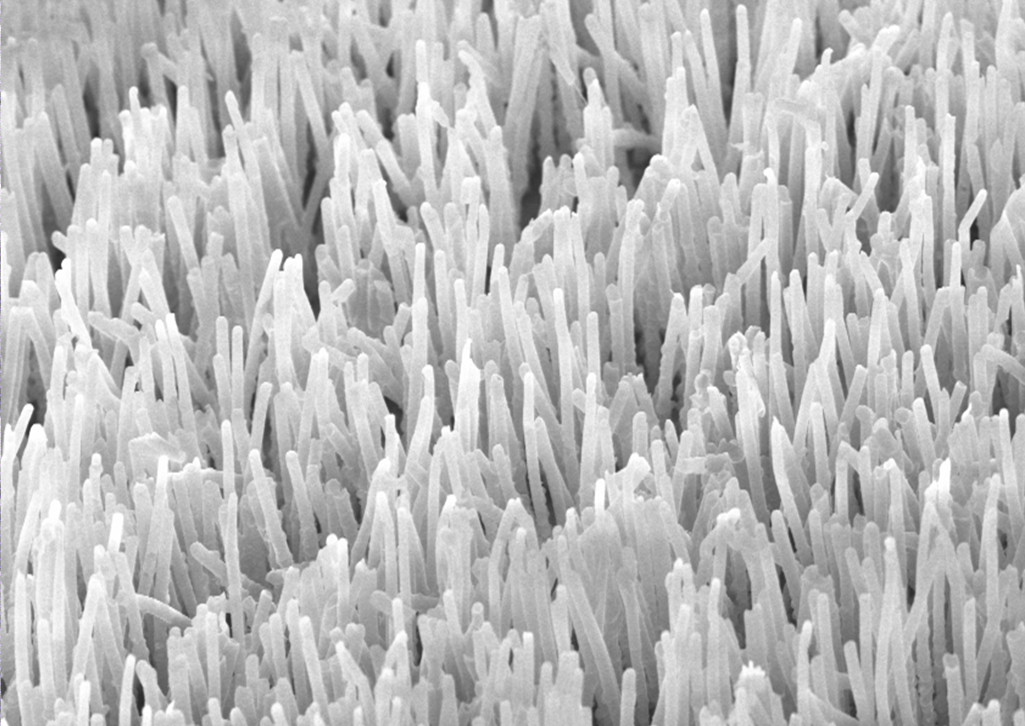
Biologically Inspired Synthetic Gecko Adhesives
Micro and nanofiber structures are designed to provide high friction and adhesive forces through mechanical control of surface interactions. |
 |
|
Millirobot Rapid Prototyping
We are developing a low cost (<$1000)) desktop factory which will allow users to build millirobots from a kit of components. |
|
Micromechanical
Flying Insect The goal of this project is to develop an autonomous 0.1 gram flying robot using insect-inspired wing kinematics. |
 |
|
Top of Page |