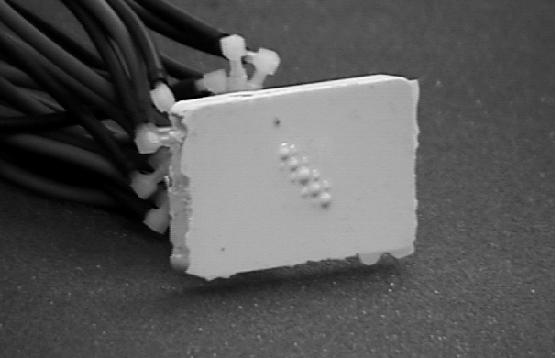
Pneumatic Tactile Displays
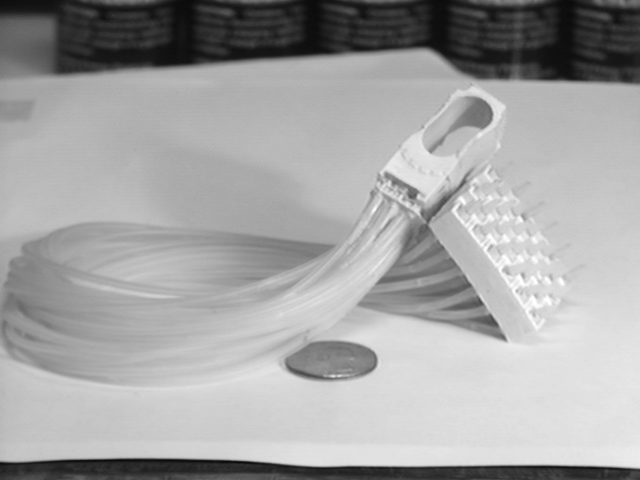
The prototype 5x5 pneumatic display (on the left) designed by Michael Cohn has
a max force range of 0.3 N per element, 3 dB point of 8 Hz, and 3 bits
of force resolution. It uses individually machined pins, with 5 atm
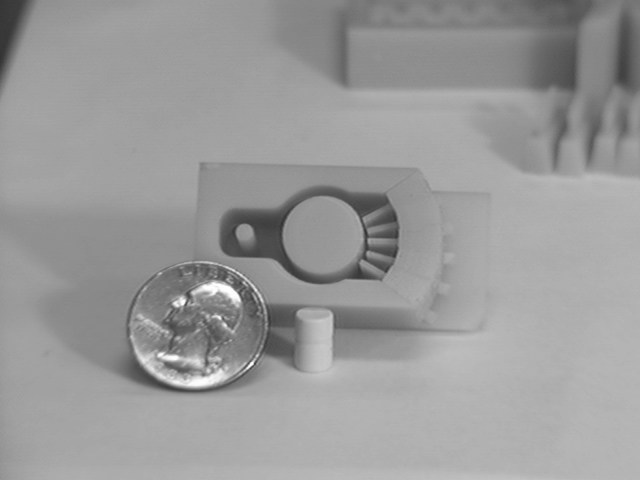
pressure. Our current tactile display (on the right) is one piece,
and molded from silicone rubber. Advantages are ease of fabrication,
no air leakage, and no pin friction.
(
A Compliant Tactile Display for Teletaction, )
< pdf >
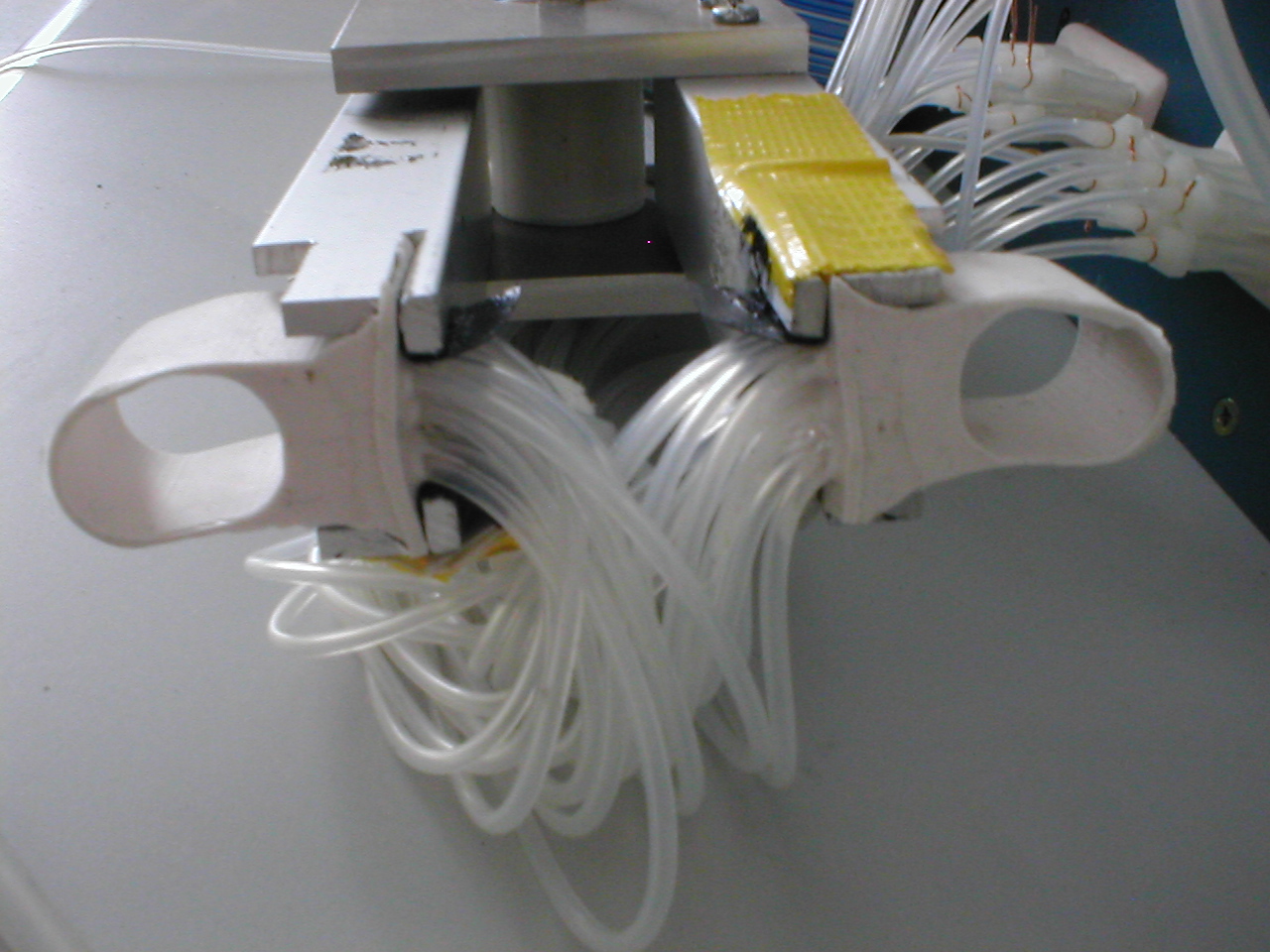
As seen below,
we can also mold curved compliant tactile displays. See
Gabe Moy's PhD thesis
Bidigital Teletaction System Design and Performance
CAD drawings and construction details
for compliant pneumatic tactile display design
Human Tactile Perception
The limitations of human tactile perception need to be understood when designing a teletaction system. We model an ideal teletaction system simply using two elastic layers placed between the finger and an object. The tactile sensor layer transmits contact stress to a display layer. This system has no spatial sampling limits or level quantization, and allows us to study ideal information transmission, considering the effects of spatial anti-aliasing and reconstruction filters in the sensor and display respectively.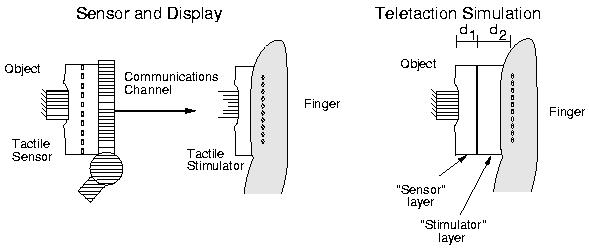
One of the important design issues is whether the tactile display needs to display shear as well as normal stress information. While the utility of shear stress display is application dependent, for applications such as surgery, where tissue is quite slippery, we have shown in a series of experiments that finer details are resolved when shear stress is not transmitted. (For more details, see [Moy and Fearing 1998].) Psychophysics results for grating resolution are shown below:
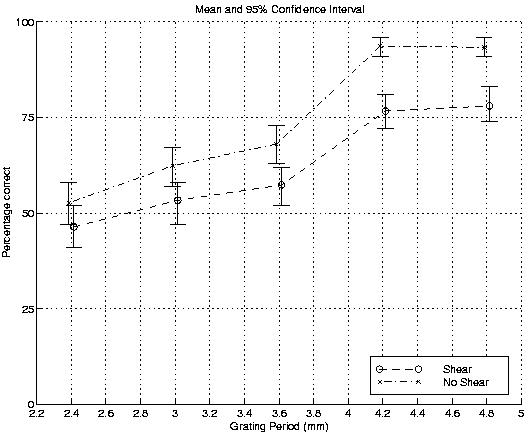
(Averages of data from 10 subjects. Each point represents the results of 300 trials testing identification of horizontal and vertical gratings.)
Papers
Note: postscript .ps files can be displayed/printed using
ghostview .
Postcript is generally printer independent unlike PDF
(Printer Dependent Format).
-
A Hybrid Pneumatic/Electrostatic Milli-Actuator
- K. H. Chiang and R.S. Fearing,
- 2000 ASME International Mechanical Engineering Congress and Exposition,
vol. MEMS, Nov. 5-10, 2000, Orlando, FL.
-
A Compliant Tactile Display for Teletaction,
< pdf >
- G. Moy, C. Wagner, and R.S. Fearing,
- IEEE Int. Conf. on Robotics and Automation, April 2000.
-
Human Psychophysics for Teletaction System Design
- G. Moy, U. Singh, E. Tan, and R.S. Fearing
- Haptics-e The Electronics Journal of Haptics Research
Vol. 1, No. 3, February, 18, 2000.
-
Inclusion Probing: Signal Detection and Haptic Playback of 2D FEM
and Experimental Data
< pdf >
- J. Yan, P.K. Scott, and R.S. Fearing
- 8th Symp. on Haptic Interfaces
for Virtual Environment and Teleoperator Systems,
Proc. ASME IMECE DSC-5
Nashville, TN Nov. 14-19, 1999.
-
- Effects of Shear Stress in Teletaction and Human Perception
< pdf >
- G. Moy and R.S. Fearing
- 7th Symp. on Haptic Interfaces
for Virtual Environment and Teleoperator Systems,
ASME IMECE Anaheim, CA Nov. 1998.
-
- Tactile After-Images from Static Contact
< pdf >
- U. Singh and R.S. Fearing
- 7th Symp. on Haptic Interfaces
for Virtual Environment and Teleoperator Systems,
ASME IMECE Anaheim, CA Nov. 1998.
- Applications of Micro-Mechatronics in Minimally Invasive Surgery,
- F. Tendick, S.S. Sastry, R.S. Fearing, and M. Cohn,
- IEEE/ASME Trans. Mechatronics,
vol. 3, no. 1, pages 34-42, March 1998.
-
- Temporal Characteristics of the Human Finger
< pdf >
- U. Singh
- Master's Report, Dept. of EE&CS May 1997
-
- Some Basic Issues in Teletaction (ps)
(pdf)
- R.S. Fearing, G. Moy, and E. Tan
- IEEE Int. Conf. Robotics and Automation, April 1997.
-
- A Surface Micromachined Microtactile Sensor Array
< pdf >
- B.L. Gray and R.S. Fearing
- IEEE Int. Conf. Robotics and Automation, April 1996.
-
- Estimating Human Tactile Resolution Limits for Stimulator Design
< pdf >
- Eden Tan
- Master's Report, Dept. of EE&CS May 1995
- ``Tactile Feedback for Teleoperation''
- M.B. Cohn, M. Lam, and R.S. Fearing,
- SPIE Conf. 1833, Telemanipulator Technology, Boston, MA, Nov. 15-16, 1992.
- doi:10.1117/12.142113
See also:
-
- The Reliability of Curvature Estimates from Linear Elastic Tactile Sensors,
(pdf)
- E. Nicolson and R. Fearing,
- Presented at the 1995 IEEE International Conference on
Robotics and Automation,
- Nagoya, Japan, May 1995
-
- Tactile Sensing and Control of a Planar Manipulator
(pdf)
- E. Nicolson
- Ph.D. Thesis, University of California at Berkeley, November 1994.
-
Sensing Capabilities of Linear Elastic Cylindrical Fingers,
- E. Nicolson and R. Fearing,
- In Proceedings, IEEE/RSJ International Conference on Intelligent Robots and Systems'93,
- Yokohama, Japan, pp. 178-185, July 1993.
- "Basic Solid Mechanics for Tactile Sensing,"
- R.S. Fearing and J.M. Hollerbach,
- Int. Journal of Robotics Research, vol. 4, number 3, Fall, 1985, pp. 40-54
- "Tactile Sensing Mechanisms,"
- R. S. Fearing,
- Int. Journal of Robotics Research, vol. 9, number 3, June, 1990, pp. 3-23
-
 old robotics page
old robotics page
Last update: July 1998
See also:
Last update: July 1998