|
|
Dextrous Micromanipulation and Microassembly
We have developed a set of dextrous micromanipulation primitives
for reorienting and regrasping rectangular parts. The parts
can be combined to build 3 dimensional microstructures.
Some examples
from Shimada et al [2000] are shown here.
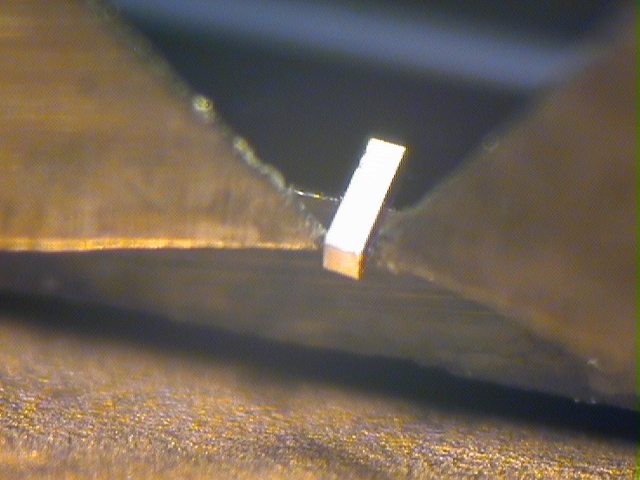
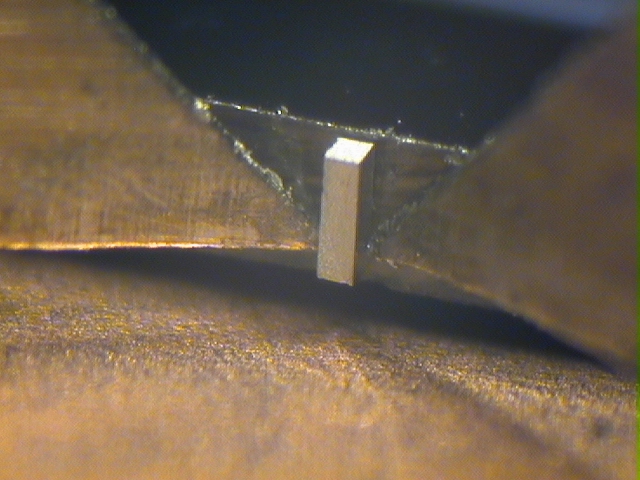
``Pivot'' grasp using fixture to generate moment on
75 by 100 by 400 micron part, rotating part.
Movie of automated assembly sequence
(MPEG 1.48 MB).
(MPEG 16 MB).
This operation is
completely open-loop, resulting in accumulated alignment errors.
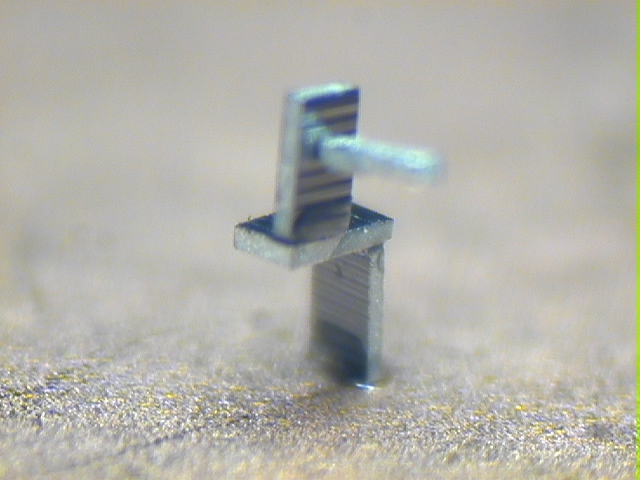
Stacked microparts, bonded with UV cure epoxy. 3 large base parts
are 400 by 230 by 75 microns thick, top part is 80 by 80 by 430 microns.
Eiji Shimada's Microassembly page
Papers on Microassembly, etc.
(see also
Desktop Rapid Prototyping Millirobots Publications
and
Micromechanical Flying Insect Publications
)
 Apparatus and method for manipulation of an object
R.S. Fearing and E. Shimada,
US Patent 6,798,120 Sept. 28, 2004.
Automating Microassembly with Ortho-tweezers and Force Sensing,
J.A. Thompson and R.S. Fearing,
IROS 2001, Maui, HI, Oct. 29-Nov. 3, 2001.
Prototyping Millirobots using Dextrous Microassembly and Folding
E. Shimada, J.A. Thompson, J. Yan, R.J. Wood and R.S. Fearing,
Symposium on Microrobotics,
ASME Int. Mechanical Engineering Cong. and Exp.,
DSC-Vol. 69-2, pp. 933-940, Nov. 5-10, 2000, Orlando, FL.
Adhesive force of a single gecko foot-hair,
K. Autumn, Y. Liang, T. Hsieh, W. Zesch, W.-P. Chan,
T. Kenny, R. Fearing, and R.J. Full,
Nature , vol. 405, pp. 681-685, June 8, 2000.
Apparatus and method for manipulation of an object
R.S. Fearing and E. Shimada,
US Patent 6,798,120 Sept. 28, 2004.
Automating Microassembly with Ortho-tweezers and Force Sensing,
J.A. Thompson and R.S. Fearing,
IROS 2001, Maui, HI, Oct. 29-Nov. 3, 2001.
Prototyping Millirobots using Dextrous Microassembly and Folding
E. Shimada, J.A. Thompson, J. Yan, R.J. Wood and R.S. Fearing,
Symposium on Microrobotics,
ASME Int. Mechanical Engineering Cong. and Exp.,
DSC-Vol. 69-2, pp. 933-940, Nov. 5-10, 2000, Orlando, FL.
Adhesive force of a single gecko foot-hair,
K. Autumn, Y. Liang, T. Hsieh, W. Zesch, W.-P. Chan,
T. Kenny, R. Fearing, and R.J. Full,
Nature , vol. 405, pp. 681-685, June 8, 2000.
Alignment of Microparts Using Force Controlled Pushing
W. Zesch and R.S. Fearing
SPIE Conf. on Microrobotics and Micromanipulation,
Nov. 2-5 1998, Boston, MA, USA.
Survey of Sticking Effects for Micro-Parts,
R.S. Fearing
IEEE Int. Conf. Robotics and Intelligent Systems IROS '95,
Pittsburgh, PA August 7-9, 1995.
A Planar Milli-Robot System on an Air Bearing
R.S. Fearing
7th Int. Symp. Robotics Research, Herrsching, Germany Oct. 1995.
|