Sponsored by
NSF DMII Program.
|
|
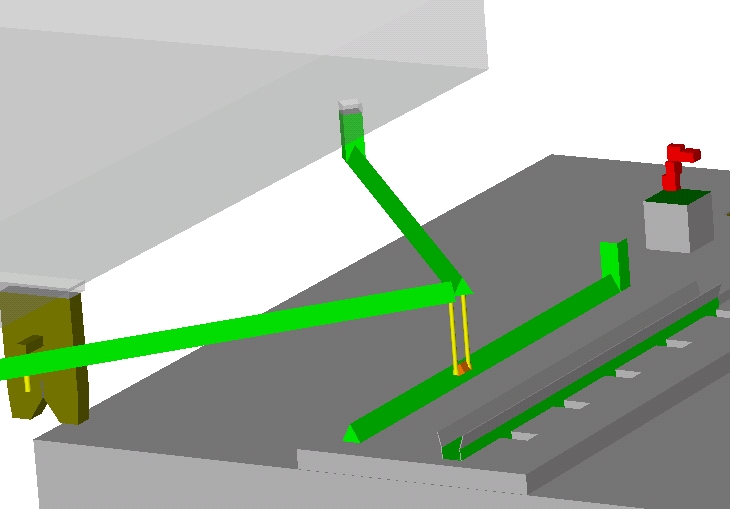
Artist's conception of milli-robot assembly cell with orthotweezers handling hollow triangular beam. |
|

|
|
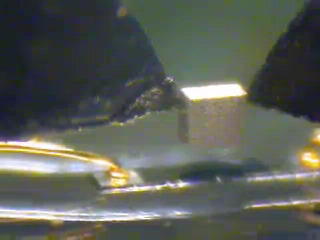
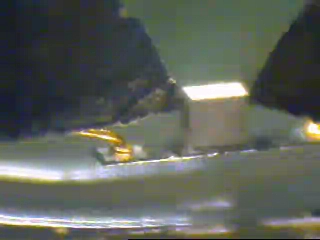
| 1. Positioning handling block above strain gauge using orthotweezers. | 2. Bonding handling brick to strain gauge using low melting point wax. (Movie) (.wmv) | 3. Lifting strain gauge from GelPak. (Movie) (.wmv) |
|

|
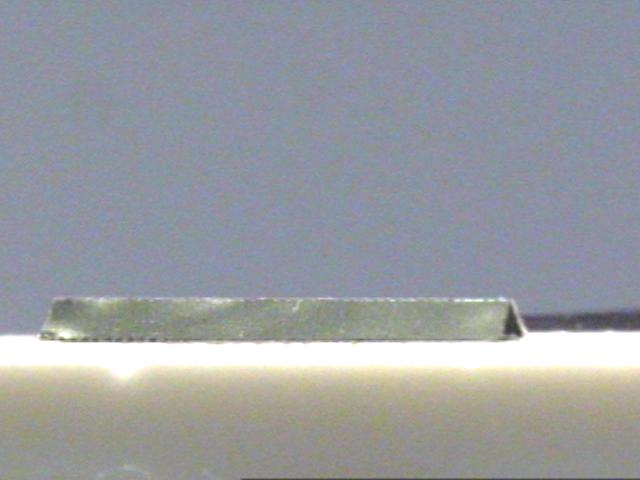
| 1. Semi-automatically folded stainless steel beam, 1 mm by 10 mm long. | 2. Lifting triangular beam using handling brick. |
Microlaze Laser Micromachining
|
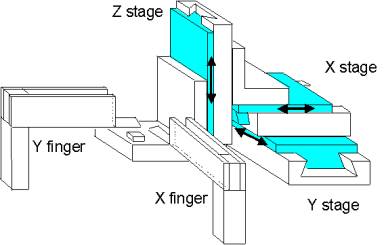
Orthotweezers for Microassembly
|
|
|
|
ALPHA Lab
|

|
|---|