|
|
|
|
|
Micromechanical Flying Insect (MFI) Project
The goal of the micromechanical flying insect (MFI) project is to develop a 25 mm (wingtip-to-wingtip) device capable of sustained autonomous flight. The MFI is designed based on biomimetic principles to capture some of the exceptional flight performance achieved by true flies. The high performance of true flies is based on large forces generated by non-steady state aerodynamics, a high power-to-weight ratio motor system, and a high-speed control system with tightly integrated visual and inertial sensors. Our design analysis shows us that piezoelectric actuators and flexible thorax structures can provide the needed power density and wing stroke, and that adequate power can be supplied by lithium batteries charged by solar cells. The MFI project started in May 1998. In the first 3 years of this MURI grant, research concentrated on understanding fly flight aerodynamics and on analysis, design and fabrication of MFI actuators, thorax and wings. In August 2001, our MFI prototype (with 1 wing) showed thrust forces on a test stand. In September 2002, we switched our fabrication from folded stainless steel to carbon fiber. In March 2003 we demonstrated 500 microNewtons of lift from a single wing on a test stand. Since March 2003, we have been working on reducing weight, increasing actuator power density, increasing air frame strength, and improving wing control. In 2007, using higher frequency actuation, we showed thrust of 1400 microNewtons, with a test bench setup. 2002 Overview of MFI project from UCB Public Affairs office. Currently work on MFI flight control and sensors is sponsored by NSF ``Robotic Insect Flight Stabilization Using Biomimetic Sensors'', Jan 2005-2009. NSF Disclaimer: ``This material is based upon work supported by the National Science Foundation under Grant No. IIS-IIS-0412541. Any opinions, findings and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation (NSF).''
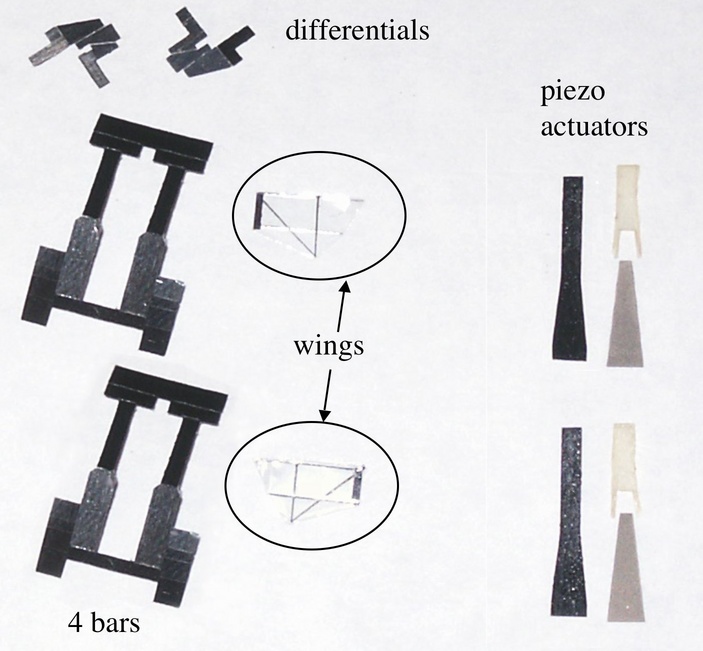
MFI component technologies
|
||||||||||||||||||||||||||||||||
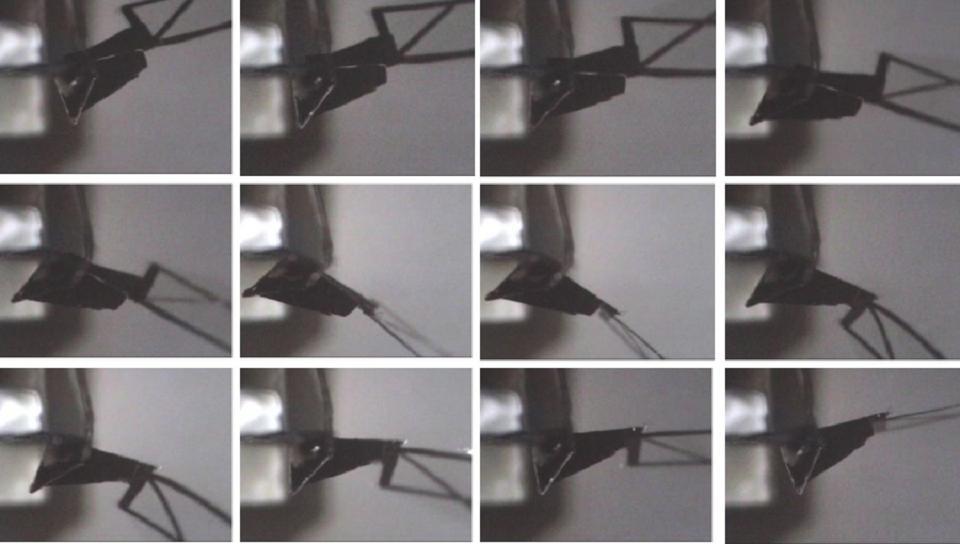

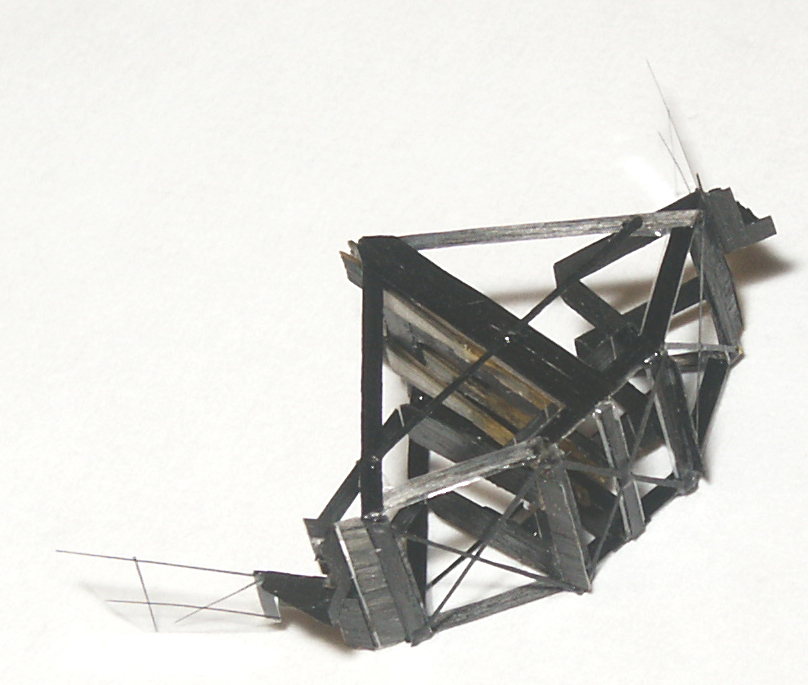
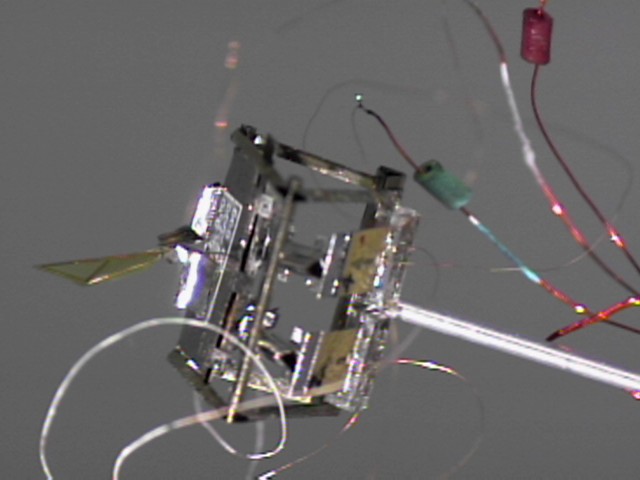
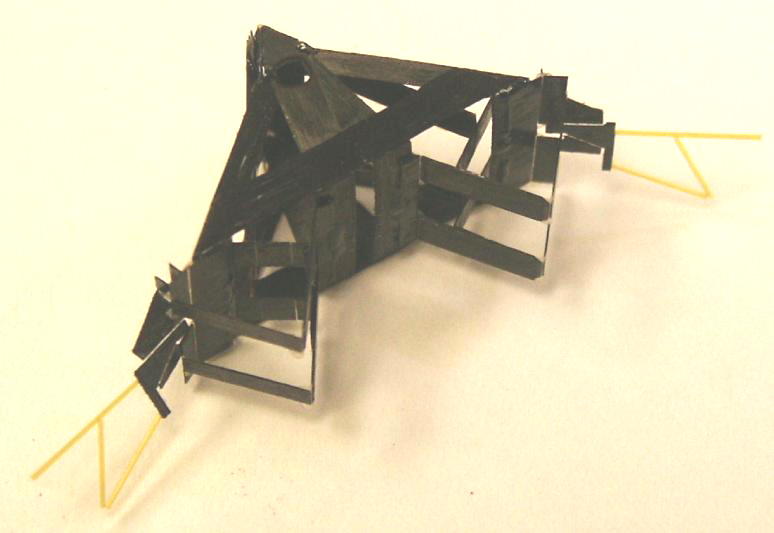
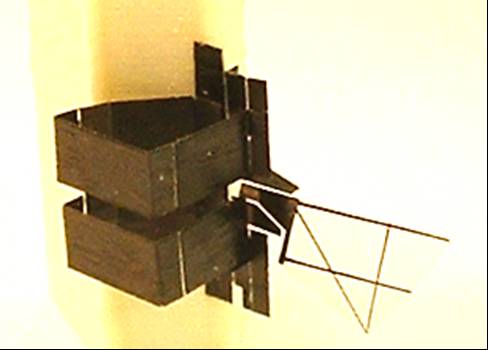
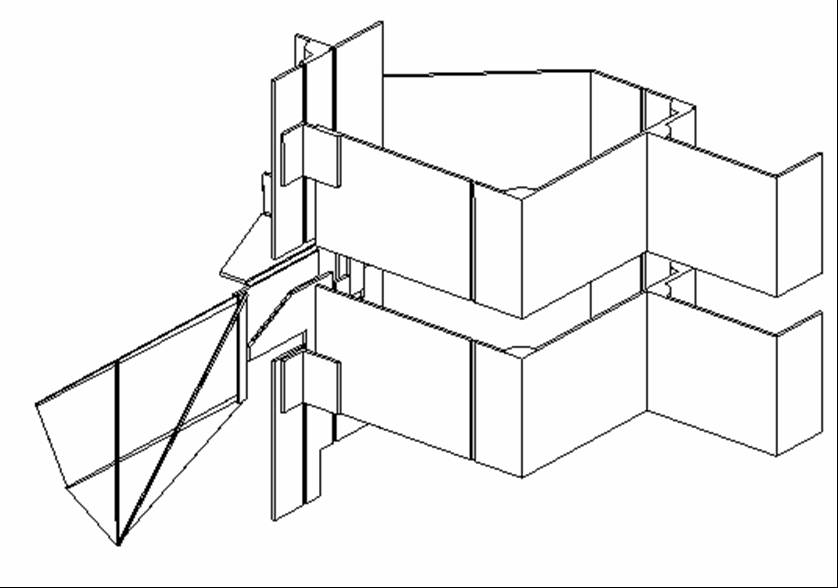
 Quad wing thorax and airframe, 8 actuators. Mass ~ 250 milligrams. Foam core carbon fiber.
(November 2003)
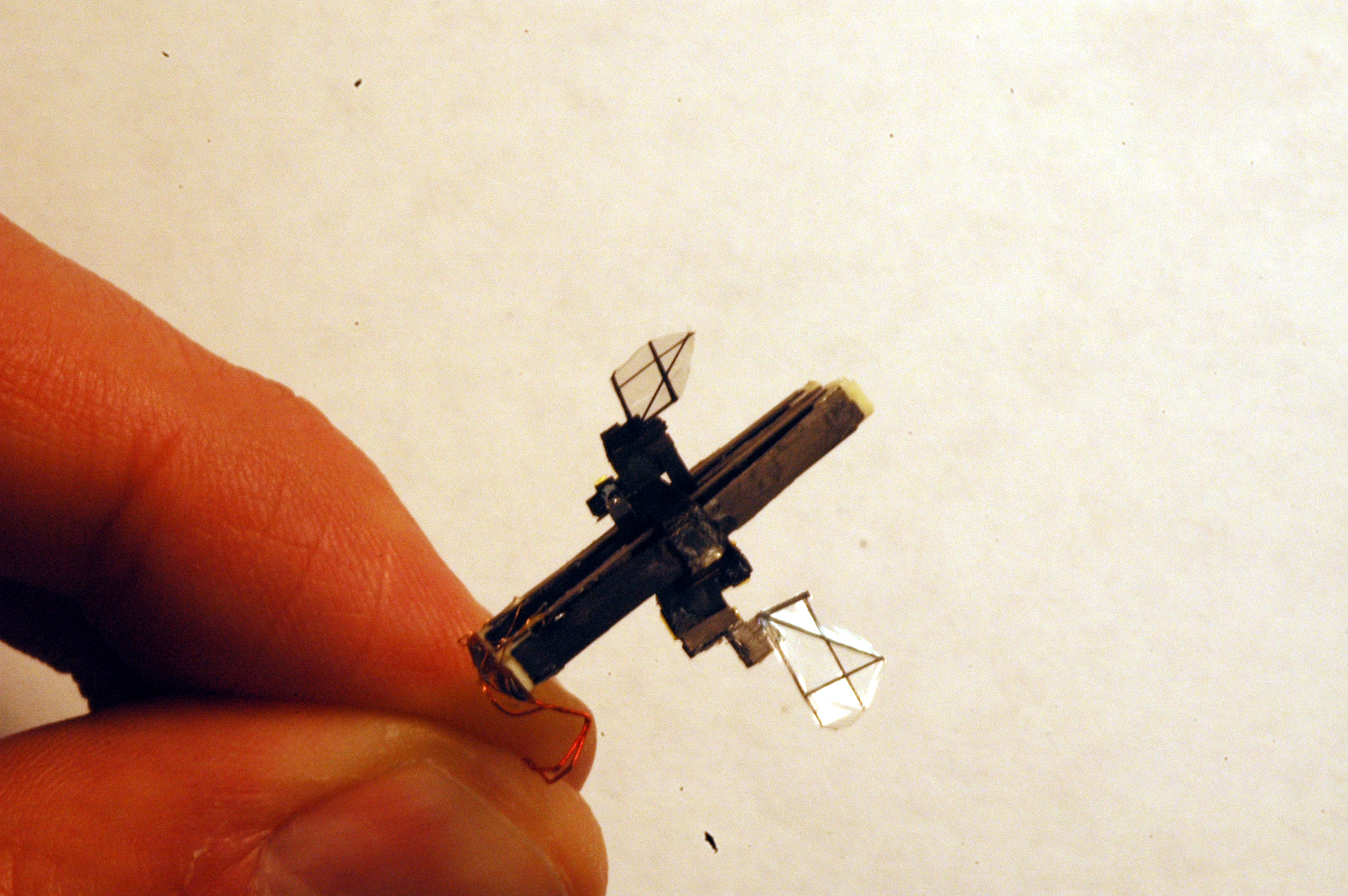
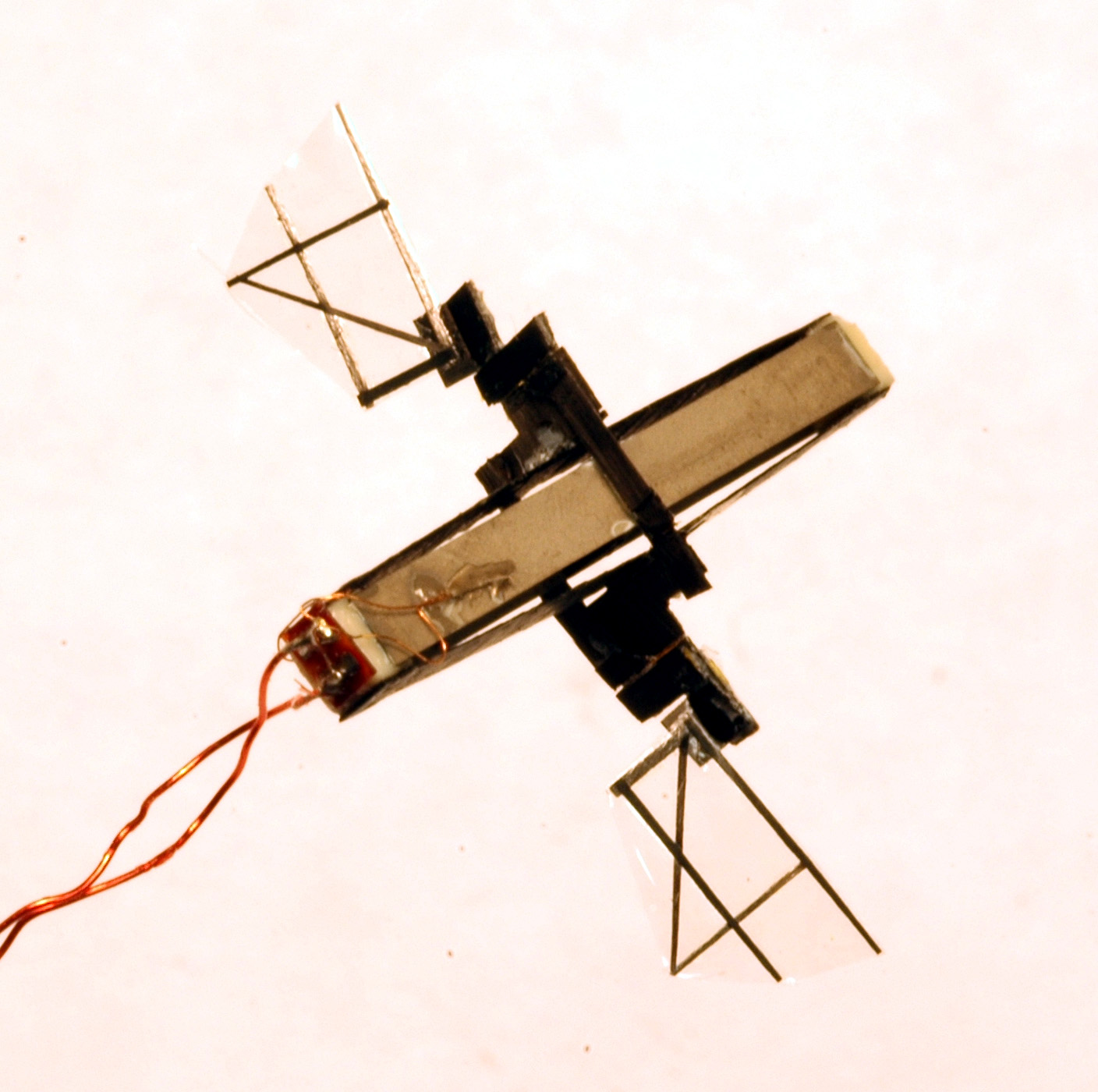
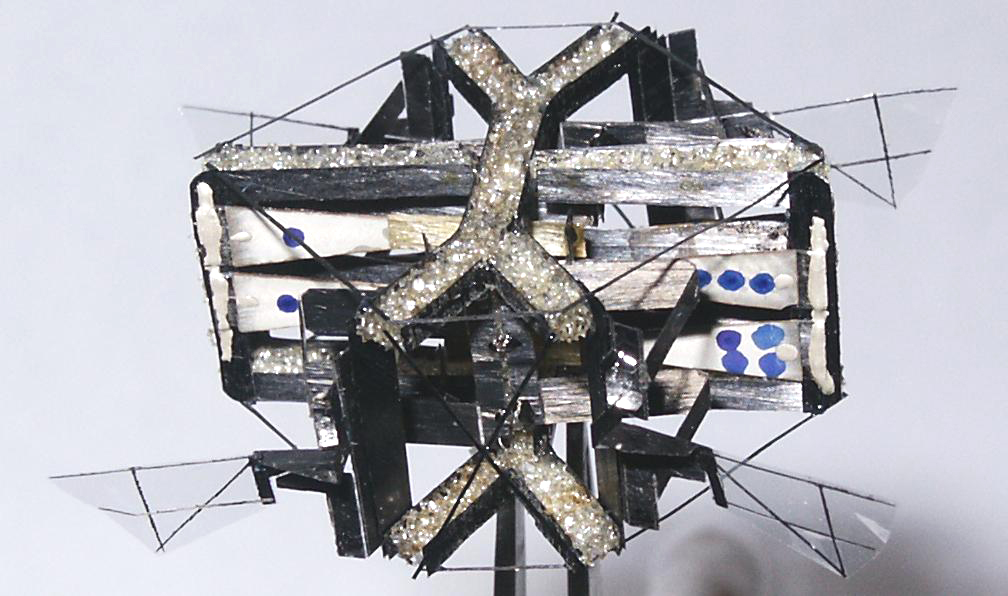
Quad wing thorax and airframe, 8 actuators. Mass ~ 250 milligrams. Foam core carbon fiber.
(November 2003)




{kind=link}
{kind=link}