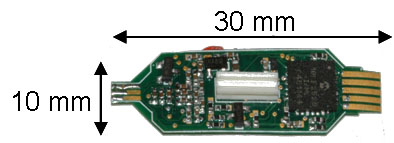
Developed for an autonomous 2g glider, we have also successfully adapted it for use in a 3g crawling robot. It provides approximately 200 VDC using a custom charge pump cascaded after a commercial boost converter, and has a 1 Mips processor onboard. The board is programmable via IR light (using a finite state machine (FSM) method), and has many other possible sensing features that can be added on, such as light seeking or optical flow sensing. The board itself is made out of 2µm polyimide flex circuit, and populated weighs approximately 440 mg. More details about this board can be found in the paper reference given below.
Paper reference: