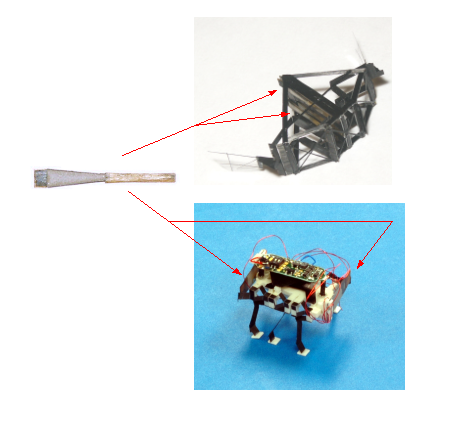
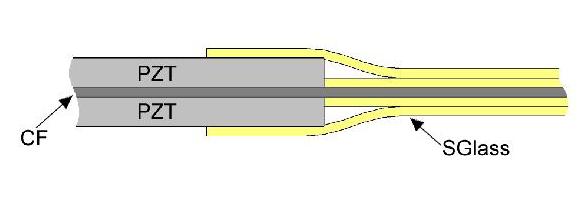
Made from composite material (some of the same material as used in our structural parts) and PZT (an amorphous piezoceramic), a typical biomorph layup is shown below. In practice, we use both unimorphs (single layer) and bimorphs (two layers of piezoceramic material).
Given the geometric constraints usually dictated by the structure itself, the parameters of the actuator like length, width, extension ratio, and width ratio are determined based upon laminate plate design as discussed in the paper reference given below.
Paper reference: