Overview
|
Flapping
flight provides the high maneuverability necessary for operation in a
partially structured indoor environment. To achieve robust
intelligence for tasks such as search and indoor navigation, the
maneuverability of the ornithopter will be combined with a learning
approach which makes minimal assumptions about the nature of
disturbances and obstacles. This approach will develop optimal control
policies for single or multiple vehicles.
Based on globally optimal
distributed reinforcement learning, we propose to
develop algorithms for a set of ornithopters to cooperate in sensing
and navigation among unmodelled obstacles such as doors and
walls. Our research will be verified with full three dimensional
dynamic simulation, a multi-tethered laboratory test-bed, as well as
with actual indoor flying ornithopters.
Collaborators:
Prof.
Pieter Abbeel, Computer Science
Division, UC Berkeley
Prof. Robert Dudley, UC
Berkeley
|
Recent Results
|
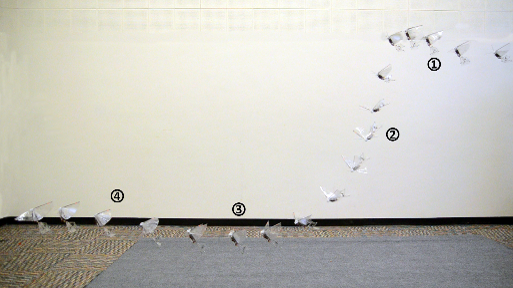
Modeling and Control of an Ornithopter for Diving
(Oct. 2016)
We identify piece-wise
affine linear models for
diving maneuvers in flapping winged flight.
These models are used to compute the reachability
sets that satisfy recovery conditions for safe diving. The point
within the dive to begin recovery was determined by checking the
current pose for inclusion in the backward reachable set.
2.2 meter dives were achieved at a success rate of 60
percent.
Rose et al. (IEEE/RSJ IROS Oct. 2016)
and movie
|
|
Coordinated Launching of an Ornithopter with a Hexapedal Robot
(May 2015)
We develop a cooperative launching
system for a 13.2 gram ornithopter micro-aerial vehicle (MAV),
the H2Bird, by carrying it on the VelociRoACH. We determine the necessary
initial velocity and pitch angle for take off using force data
collected in a wind tunnel and use the VelociRoACH to reach
these initial conditions for successful launch.
Rose et al. (IEEE ICRA May 2015)
video
|

|
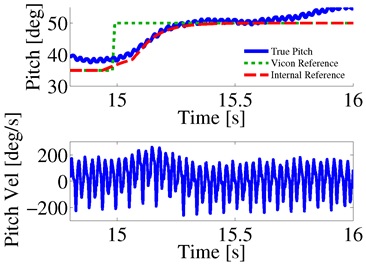
Ornithopter Free Flight Compared to Wind Tunnel Data
(June 2014)
We compare the flight of an ornithopter
using free flight data collected
from a Vicon motion capture system, to measured wind tunnel
force and moment values.
We determined that the wind tunnel underestimates the angle
of attack of the equilibrium point observed in free flight by 15
degrees, while the equilibrium velocity has an error of 0.1 m/s
between the two sets at an average flight speed of 2 m/s.
(ICRA 2014).
link
movie
|
|
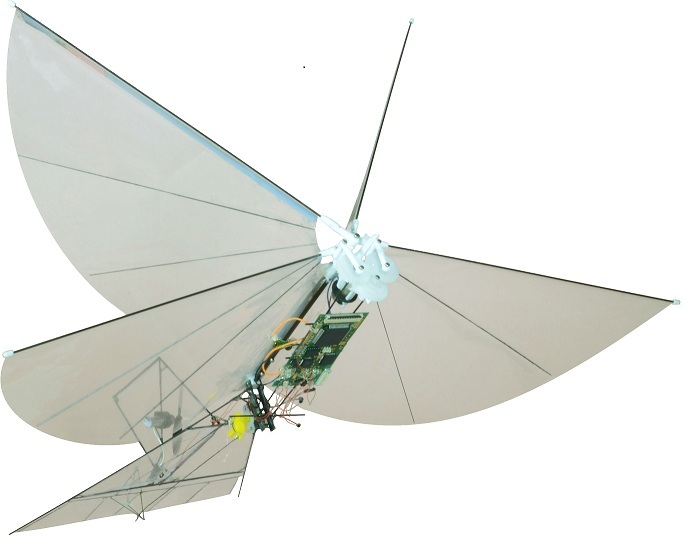
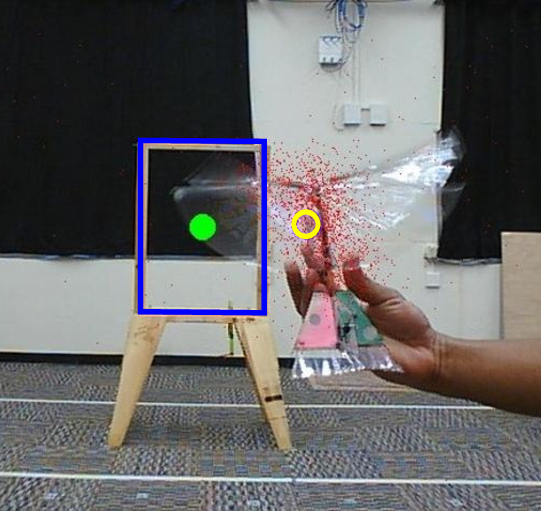
Cooperative Control for Window Traversal with an Ornithopter MAV
(Mar. 2013)
We demonstrate
cooperative target-seeking between a 13 gram ornithopter,
and a lightweight ground station using computer vision.
The H2Bird features a carbon fiber airframe, tail rotor,
and elevator, and carries a 2.8 gram payload.
The ground station provides
heading estimates to the ornithopter using a real-time
motion tracking algorithm.
A model accurately predicts the backwards reachable
region for flight through narrow passages.
Autonomous Agents and Multiagent Systems (AAMAS2013).
link
movie1
movie2
|
|
|
Flight
Control for
Target Seeking by 13 gram Ornithopter (Sept. 2011)
We demonstrate
autonomous flight control of 13 gram ornithopter capable of flying
toward a target without any remote assistance. For this demonstration,
we have developed a closed-loop attitude regulator for the ornithopter
using onboard sensing and computational resources. Movie
IROS 2011.
|

|
BOLT: Bipedal
Ornithopter for Locomotion Transitioning (Sept. 2011)
Bolt is a 13 gram
ornithopter with legs for mixed-mode locomotion. In running modes,
wings provide passive stability. With wing assisted running, BOLT can
run at 2.5 m/sec while maintaining ground contact.
IROS 2011 .
movie
|

|
|
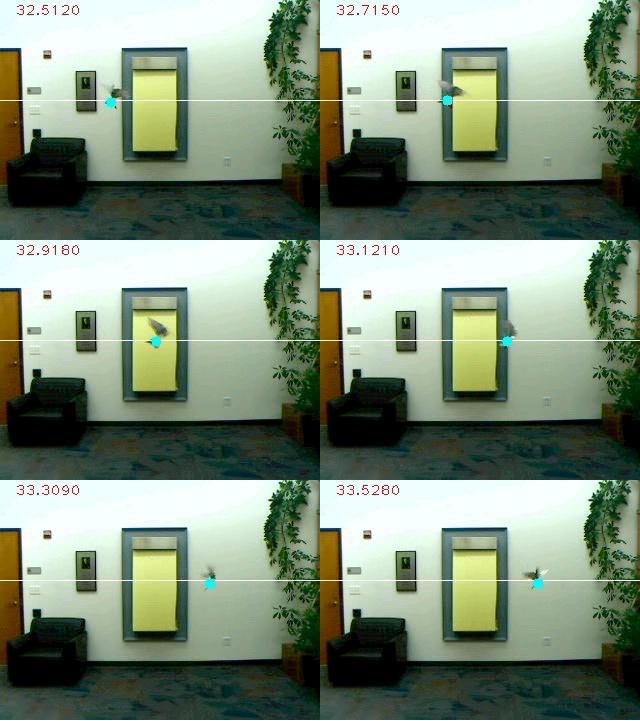
Altitude
Regulation
of
iBird
(Sept.
2010)
We identify free flight
aerodynamic forces at a stable equilibrium point of an ornithopter and
compare them with the tethered flight aerodynamic forces. We developed
a closed-loop altitude regulation for the ornithopter using an external
camera and onboard electronics. The results show that the tethered
aerodynamic force measurement of a 12 gram ornithopter with zero
induced velocity underestimates the total flight force by 24.8 mN.
Movie (1.1 MB .avi)
Biorob 2010.
|
|
|
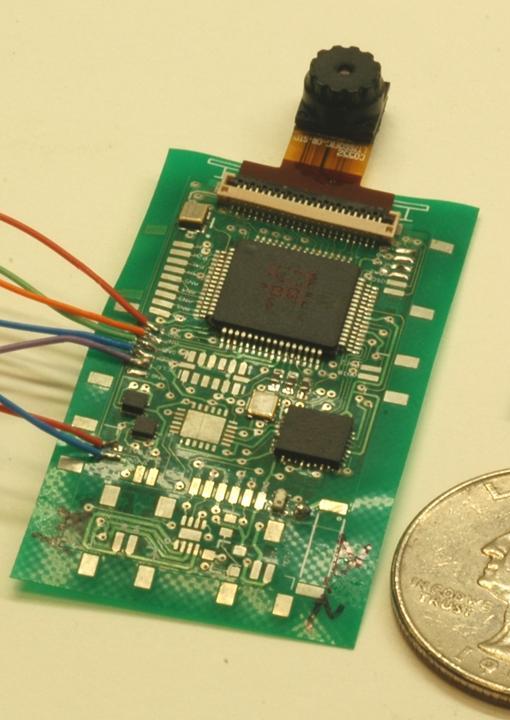
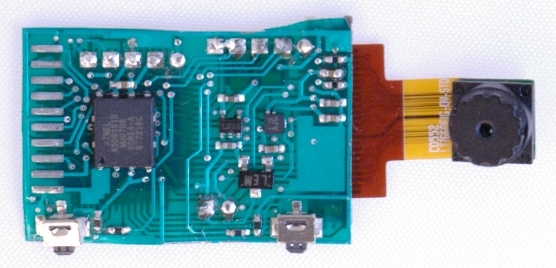
Image
Proc 2.2 CPU (August 2010)
Image Proc 2.2
design revision by Stan Baek. Board contains cell phone, gyro,
accelerometer, 802.15.4 radio, and 2 channel motor driver in 1.4 grams.
|
|
|
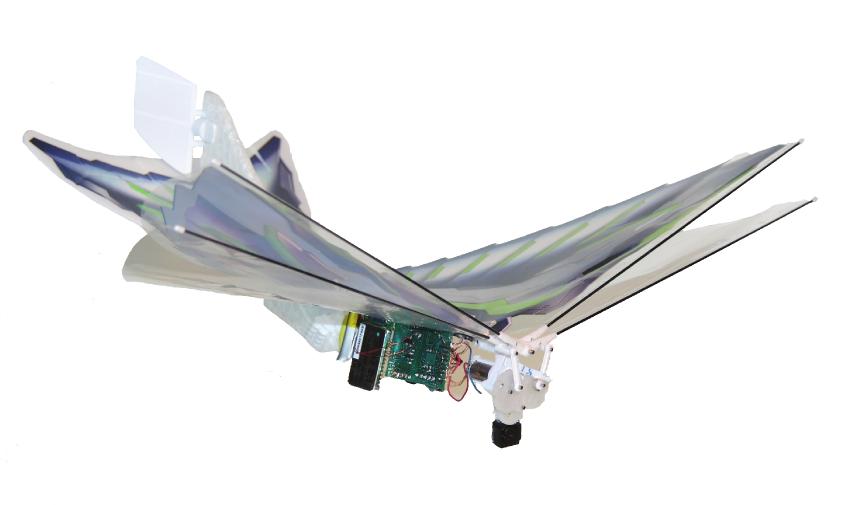
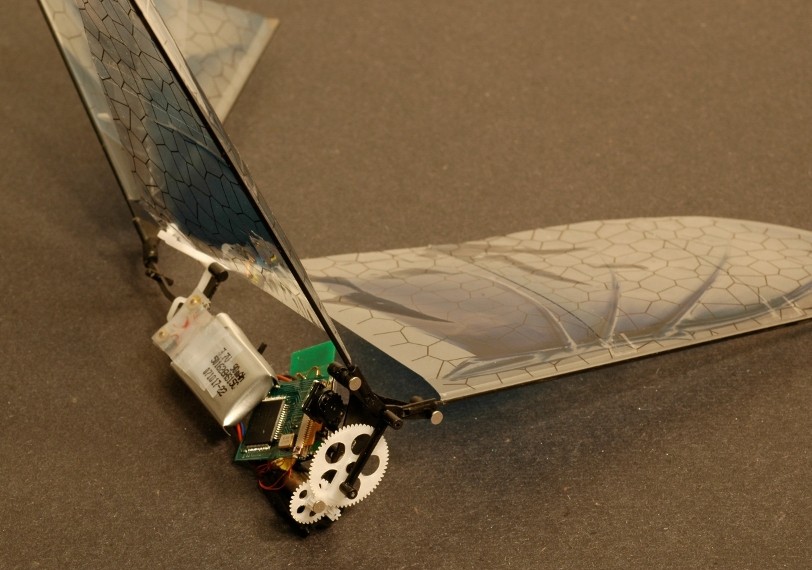
iBird-bot
(2010)
Commercially available
iBird hover capable ornithopter equipped with ImageProc dsPIC33 CPU
board. Total mass 12 grams.
|
|
|
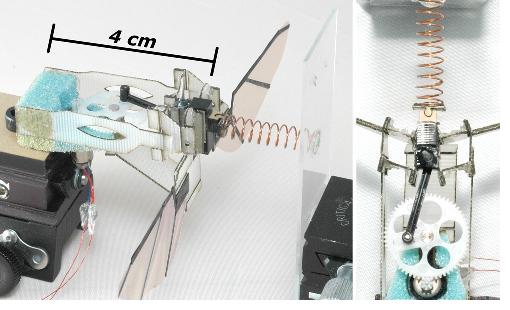
Efficient Resonant Drive of Flapping (Oct.
2009)
A model for a
battery-driven DC motor driving a crank is developed, which shows in
experiment a 30% reduction in required power when driven in resonance.
IROS
2009
|
|
|
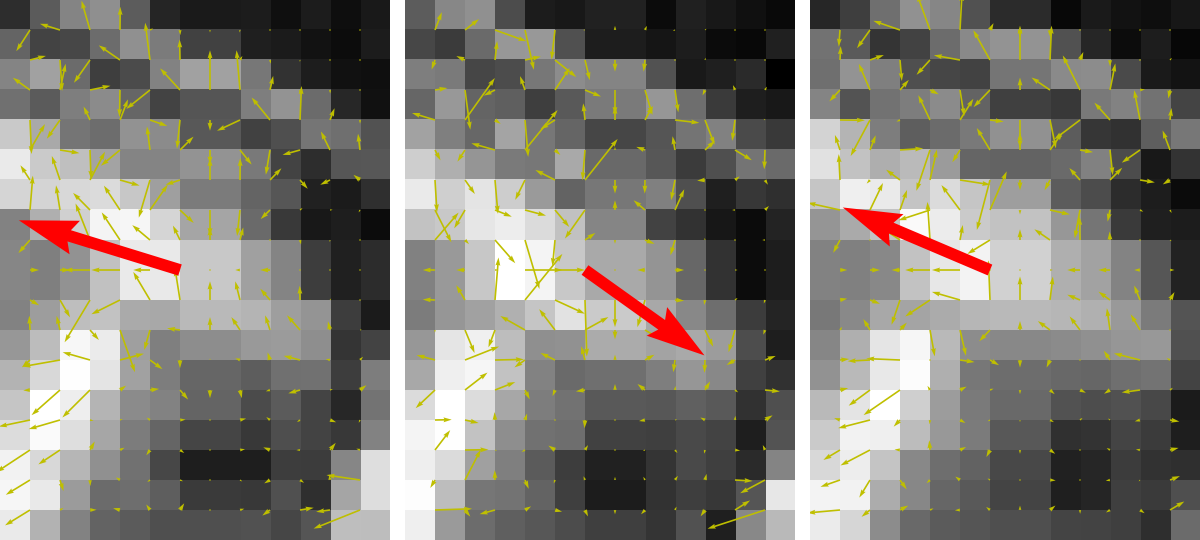
Optical
Flow
on
an
Ornithopter
(Oct. 2009)
Due to the pitching
motion of flapping flight, optical flow has a large superimposed
velocity component. This component can be sampled at the wing flapping
frequency to recover the underlying signal.
IROS 2009
|
|
|
Vamp-bot (2009)
Commercially available
VAMP ornithopter with custom low mass electronics. Total mass is
approximately 13 grams, including Bluetooth and cell phone camera.
|
|
|
ImageProc
1
CPU
(2008)
PIC CPU with Omnivision
camera, design by Fernando Garcia Bermudez. Schematic
ImageProc v1.0 |
|
|
|
Publications
|
Stanley
S.
Baek,
Fernando L. Garcia Bermudez, and Ronald S. Fearing,
``Flight
Control for Target Seeking by 13 gram Ornithopter,'' IEEE Int. Conf.
Intelligent Robots and Systems,
IROS Sept. 2011.
K.C. Peterson and
R.S. Fearing, ``Experimental
Dynamics of Wing Assisted Running for a Bipedal Ornithopter,'' IEEE
Int. Conf. Intelligent Robots and Systems, to appear
Sept. 2011.
S.
Baek and R.S. Fearing,
``Flight forces and altitude regulation of 12 gram i-Bird,
IEEE BioRob, Sept. 2010.
S.S. Baek, K.Y. Ma, R.S. Fearing,
``Efficient
Resonant
Drive
of
Flapping
Wing Robots''
IEEE Int. Conf. Intelligent Robots and Systems, St. Louis, MO October
2009.
F. Garcia Bermudez and R.S. Fearing,
``Optical
Flow
on
a
Flapping
Wing Robot,''
IEEE Int. Conf. Intelligent Robots and Systems, St. Louis, MO
October 2009.
|
|
|


