Recent
Results
|
Bidirectional, thin-film repulsive-/attractive-force
electrostatic actuators for a crawling milli-robot
(July 2018)
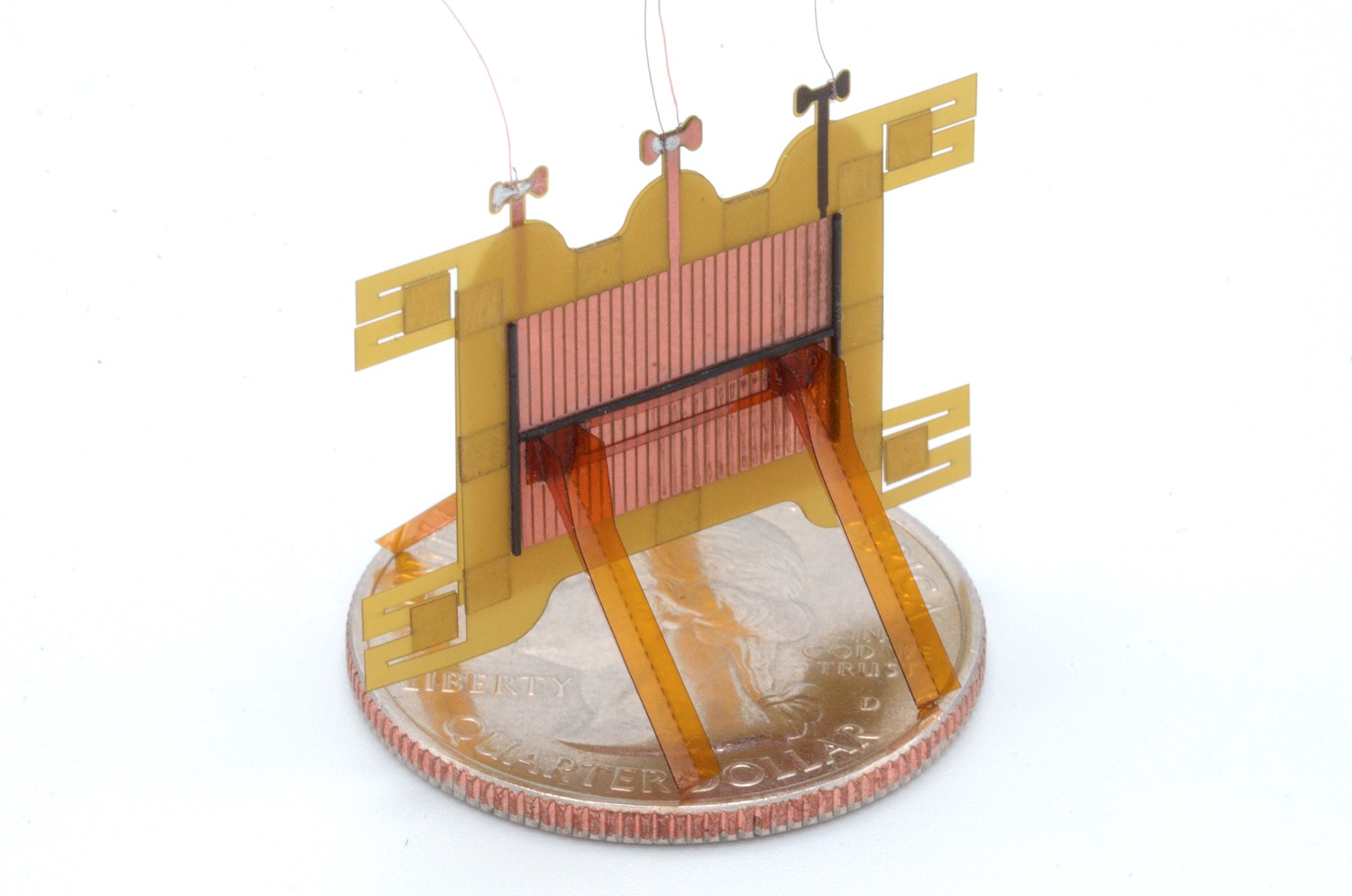
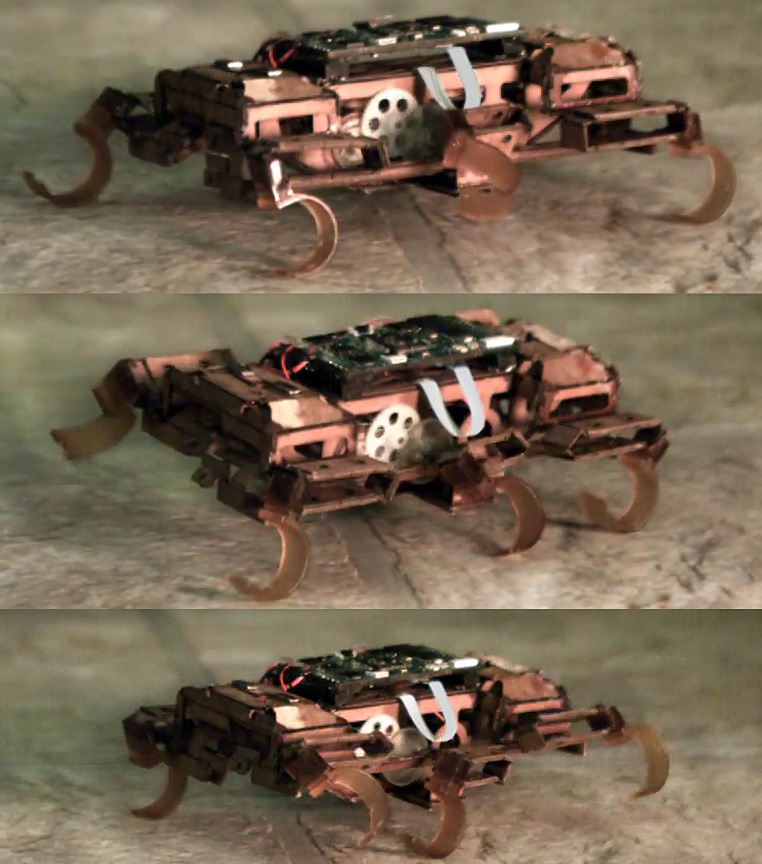
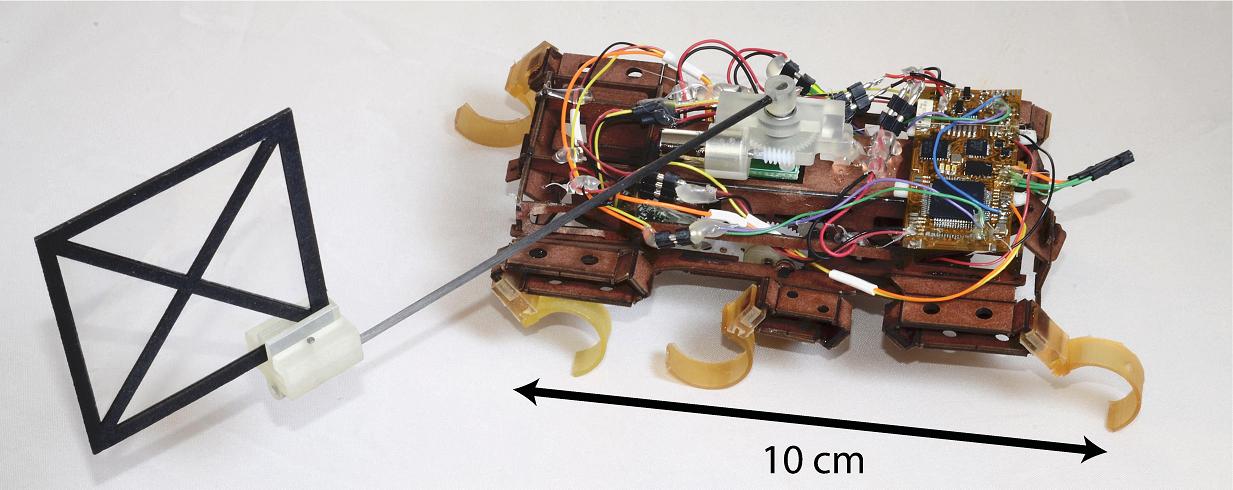
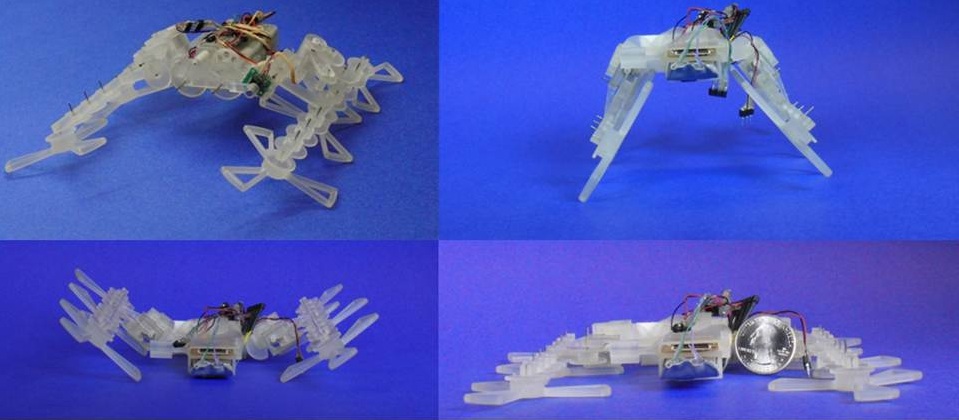
RAFA is a new thin-film electrostatic actuator which works in both
attractive and repulsive modes. The two-layer actuator generates
electrostatic pressures up to 156 Pa in repulsion and 352 Pa in
attraction when operating at 0 to 1.2 kV. RAFAR, a 132 mg tethered
milli-robot, crawls at 0.32 mm/s with anisotropic friction feet.
E.W. Schaler, L. Jiang, C.Lee, and R.S.Fearing,
(MARSS 2018) .
(MARSS 2018 Best Student Paper Award.)
|
|
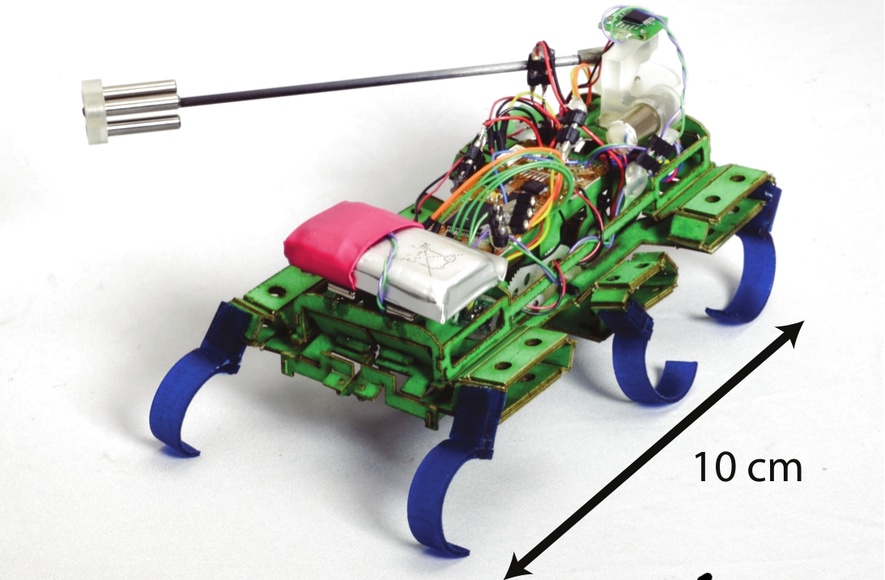
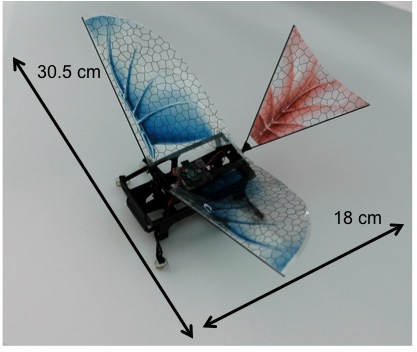
Coordinated
Launching of an Ornithopter with a Hexapedal Robot
(May 2015)
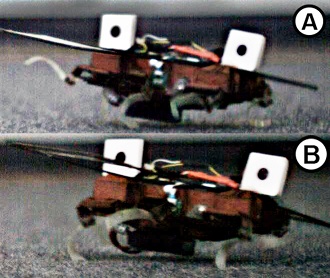
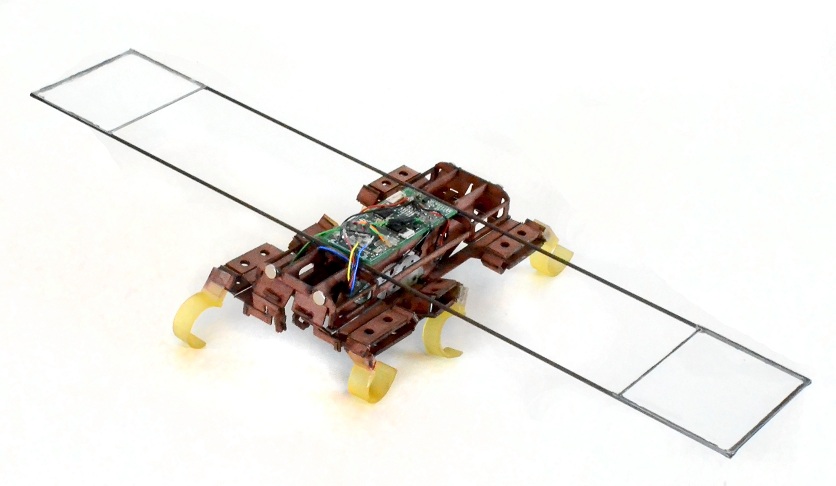
We develop a
cooperative launching system for a 13.2 gram
ornithopter micro-aerial vehicle (MAV), the
H2Bird, by carrying it on the VelociRoACH. We
determine the necessary initial velocity and pitch
angle for take off using force data collected in a
wind tunnel and use the VelociRoACH to reach these
initial conditions for successful launch. Rose et
al. (IEEE
ICRA May 2015) video
|

|
Running beyond the bio-inspired regime
(May 2015)
The X2-VelociRoACH is a 54 gram experimental
legged robot which was developed to test hypotheses about
running with unnaturally high stride frequencies. It is capable
of running at stride frequencies up to 45 Hz, and velocities up
to 4.9 m/s, making it the fastest legged robot relative to size.
Haldane and Fearing (
IEEE ICRA May 2015)
video
|
|
Anisotropic Leg Spines for Increased Traction
(May 2015)
Collapsible leg spines found on insects and
spiders provide a passive mechanism for increased traction
while running over complex terrain. Spiny feet for VelociRoACH
reduced dimensionless Cost of Pulling by an order of magnitude
while robot speed while pulling load increased by 50%.
Lee and Fearing
( IEEE ICRA May 2015)
video
|

|
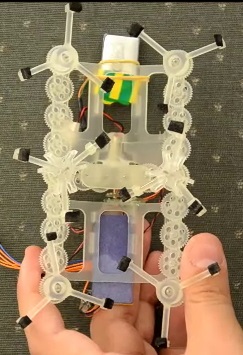
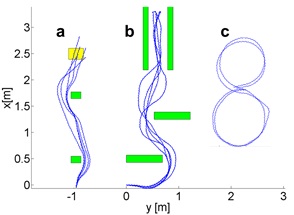
1STAR: 1 actuator STeerAble Robot
(June 2014)
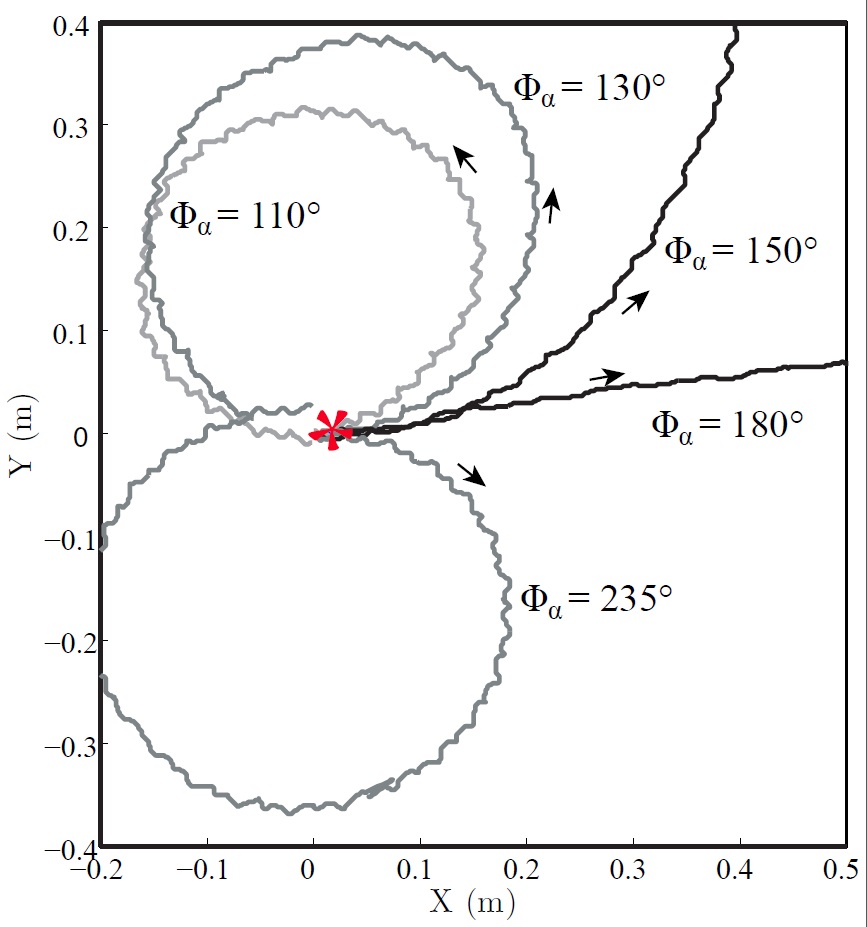
We present a novel dynamic gait to control in-plane locomotion
(forward, back, clockwise and counter clockwise rotations) of a
compliant legged hexapedal robot using a single actuator. The gait
exploits the compliance disparity between alternate stance tripods, to
generate rotation by controlling the acceleration of the robot.
Zarrouk and Fearing (
IEEE ICRA June 2014)
movie
(Finalist for best conference video)
|
|
Roll oscillation modulated turning
(June 2014)
A new dynamic turning mode in legged robots is demonstrated, which uses a
phase-locked gait to excite coupled height and roll oscillations. A
modified robot with enhanced roll oscillations turned at 206 deg/sec at a speed
of 0.4 m/s.
Haldane and Fearing
(IEEE ICRA June 2014)
video
|
|
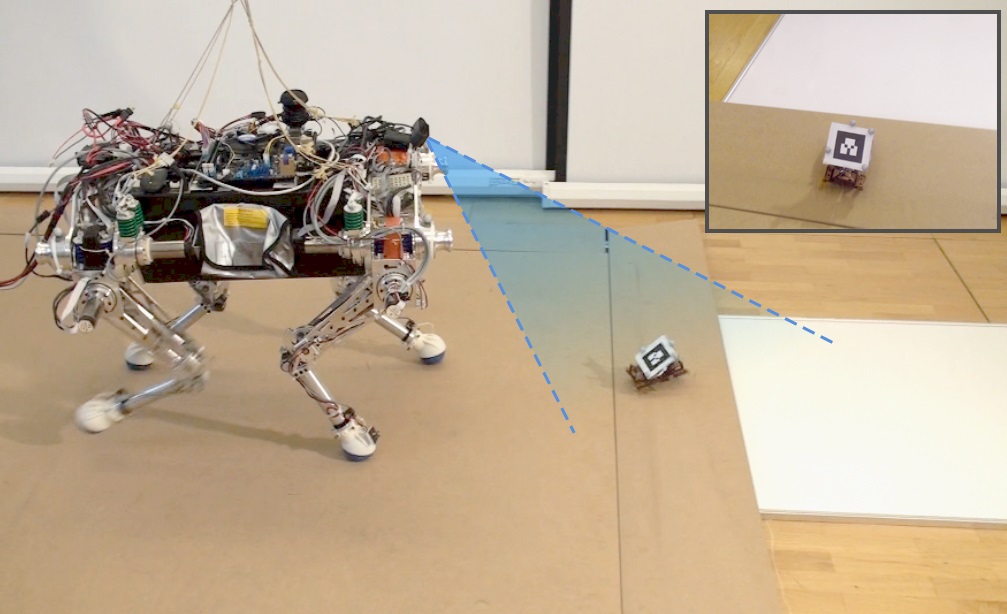
Detection of Slippery Terrain with Picket Robot
(June 2014)
Experiments conducted with StarlETH (ASL, ETH Zurich) and UCB VelociRoACH using
joint localization detected slippery terrain with 92% accuracy.
Haldane et al. (
IEEE ICRA June 2014)
video
|
|
Aerodynamic Steering SailRoACH (Oct. 2013)
SailRoACH
uses aerodynamic forces on its tail to turn, achieving at 1.2 meter
radius turn while running at 1.6 meters per second. Scaling laws work
favorably for this turning mode for fast running small robots.
Kohut et al. (IEEE IROS Nov. 2013)
movie
|
|
A Sprawl Tuned Autonomous Robot
(Feb. 2013)
This robot has a variable leg
sprawl angle in the transverse plane to adapt its stiffness,
height, and leg-to-surface contact angle.
Contact angle and normal contact forces are
substantially reduced when the sprawl angle is low, and the
velocity increases over smooth surfaces, with stable running at
all velocities up to 5.2 m/s.
Zarrouk et al. ICRA 2013.
Movie
|
|
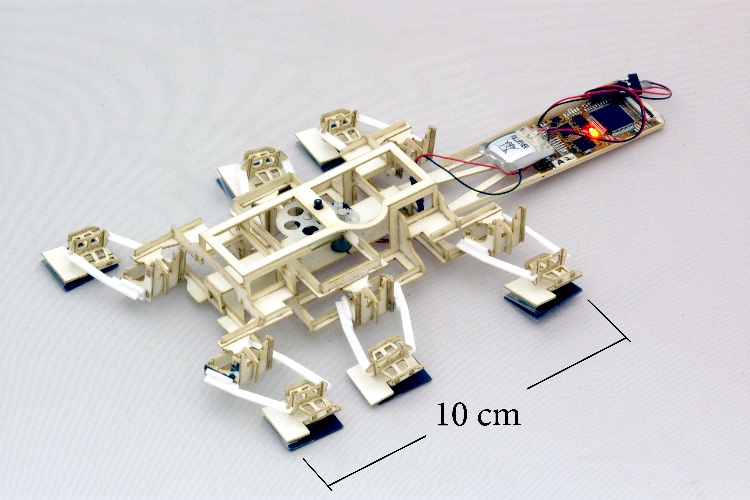
Animal-inspired Design and Aerodynamic Stabilization of a Hexapedal Millirobot
(Jan. 2013)
The VelociRoACH is a 10 cm long, 30 gram
hexapedal millirobot capable of running at 2.7 m/s, making
it the fastest legged robot built to date, relative to scale.
Dynamic similarity technique combined with aerodynamic damping
provides stability at high speeds.
D. Haldane et al. IEEE ICRA 2013.
Movie
|
|
Dynamic Climbing of Smooth
Surfaces (Oct.
2012)
Dynamic climbing
of near-vertical surfaces introduces reaction
forces which require greater normal adhesion to
prevent falling. Dynamic
climbing on a 30 degree slope succeeds at 12 Hz
leg rate, but only 4 Hz on a 70 degree
slope.
Birkmeyer, Gillies, Fearing IROS Oct 2012
movie1
movie2
|
|
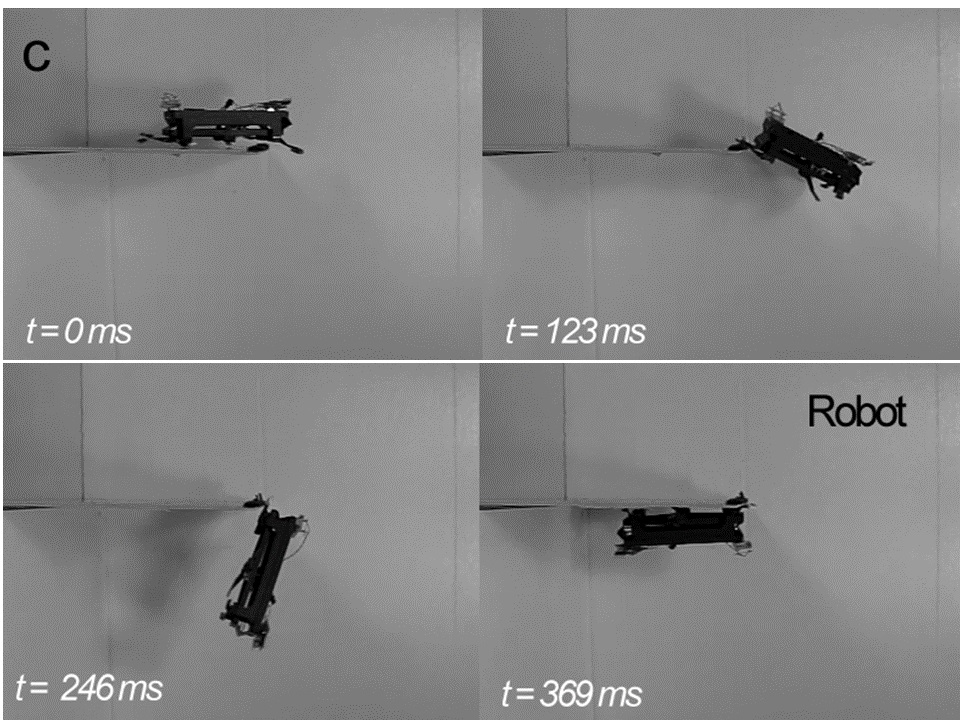
Rapid Inversion:
Running Animals and Robots (June
2012)
Cockroaches and geckos
can escape when running by swinging under a ledge in a pendulum like
motion. The DASH robot, with a special foot attachment, can also swing
in a similar manner. Mongeau et. al
PLoS June 2012 |
|
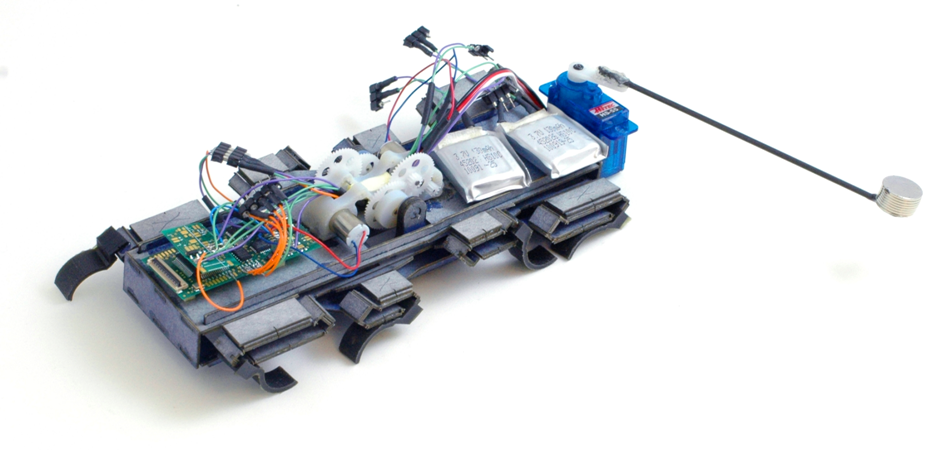
6 legged TAYLRoACH (July 2012)
The 100-mm scale
Hexapedal robot TAYLRoACH
can rapidly maneuver with 90 degrees turns while running.
Kohut et al. CLAWAR, Baltimore, July 2012.
Tail Maneuver movie
|
|
OctoRoACH with Tail (May 2012)
The 100-mm scale
OctoRoACH robot can turn using differential drive at 100 degrees per
second, or with a dynamic tail with peak turn rates of 400 degrees per
scond.
Pullin et al. ICRA
2012
movie |
 |
DASH+Wings:
Wing
Assisted Running (Oct. 2011)
DASH+Wings is a
small
hexapedal winged robot that uses flapping wings to
increase its ground
locomotion capabilities. The wings increase
climbing slopes and
stability, but do not provide enough thrust for
flight. A
wing assisted
running robot and implications for avian flight
evolution. Bioinspiration
and Bioimetics
|
|
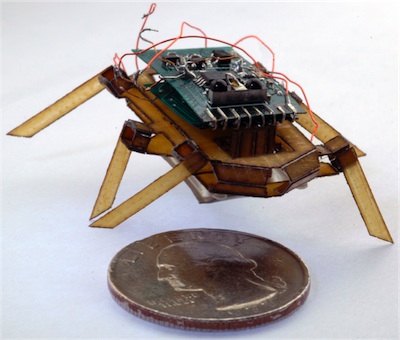
OctoRoACH:Dual Drive MilliRobot (Sep. 2011)
The OctoRoACH robot has a
mass of less than 30 grams, and includes
the ImageProc CPU with gyro, accelerometer, radio and camera, is
capable of locomotion in rough surfaces. Robot designed by A. Pullin.
Pullin et al. ICRA
2012
|

|
CLASH:
Climbing loose vertical cloth (Sep. 2011)
The CLASH robot has a
mass of 15 grams, and is capable of climbing a loose cloth surface at
15 cm per second using a simple passive claw mechanism and a coupled
in-plane leg drive system.
(Birkmeyer et al. IROS 2011) and
movie
|

|
MEDIC Millirobot with
body-supported climbing
(Dec. 2010)
The Medic robot has a
mass of 5.5 grams, and is capable of positioning within
1 mm using static SMA drive. The robot includes camera and wireless.
(Kohut et al. ICRA 2011.) |
|
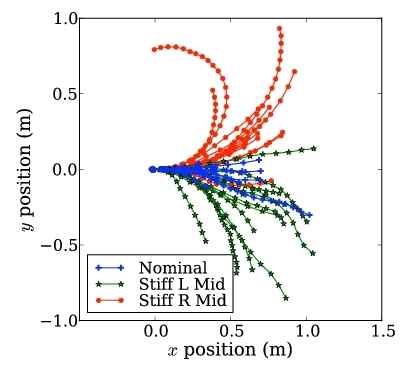
Dynamic turning by
modulating leg stiffness
(Sep. 2010)
The dynaRoACH robot has
mass of 24 grams and is capable of running at 14
body lengths per second. By changing leg stiffness, the robot can
execute a 90 degrees turn in 5 leg strides. BioRob 2010
Movie (slow
motion) Movie (real time)
|
|
RoACH 2.0 and DASH on
Granular Media (Apr. 2010)
Joint work with Goldman
lab at GeorgiaTech to measure cost-of-transport on granular media shows
5-30 J/kg-m at 6-10 body lengths per second. SPIE 2010 |
|
|
DASH 16 gram Hexapedal
Robot (Oct. 2009)
Using compliant fiber board as
structural material, and a single main driver motor, the DASH robot is
capable of 15 body lengths per second on flat surfaces. The structure
is resilient and survives ground impact at terminal velocity of
10
meters per second.
DASH: A Dynamic 15g Hexapedal Robot, IROS 2009.
Video
(Youtube).
|

|
|
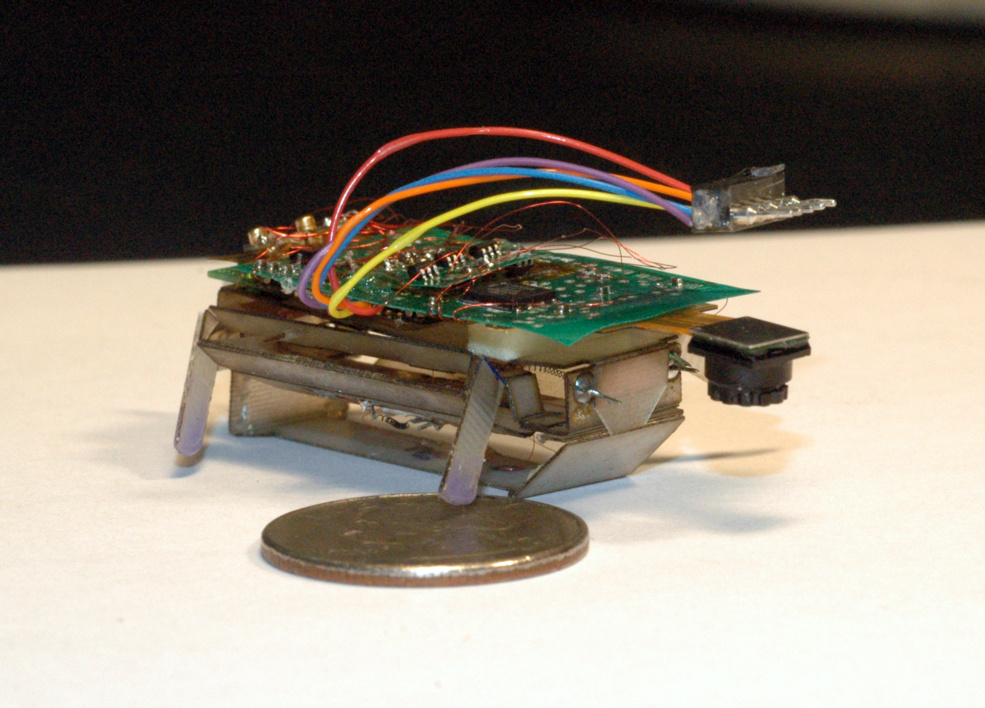
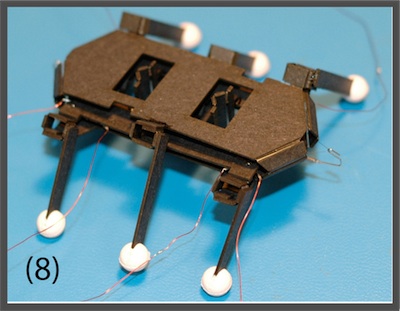
The miniRoACH Robot (2008)
In
the Biomimetic Millisystems Lab we have combined our expertise in
building millirobots with an interest in legged systems to build what
we believe is the smallest untethered, legged robot to date - a 2.5
gram legged robot called the Robotic Autonomous
Crawling Hexapod
(RoACH). This robot makes use of the
Smart Composite
Microstructures fabrication process
and integrated shape memory alloy (SMA) wire actuators. All power,
control, and communication electronics are carried onboard and the
entire robot is powered with a 20maHr Lithium-polymer battery from the
Full River corporation.
movie (.mov)
(.mp4)
|
 |
|
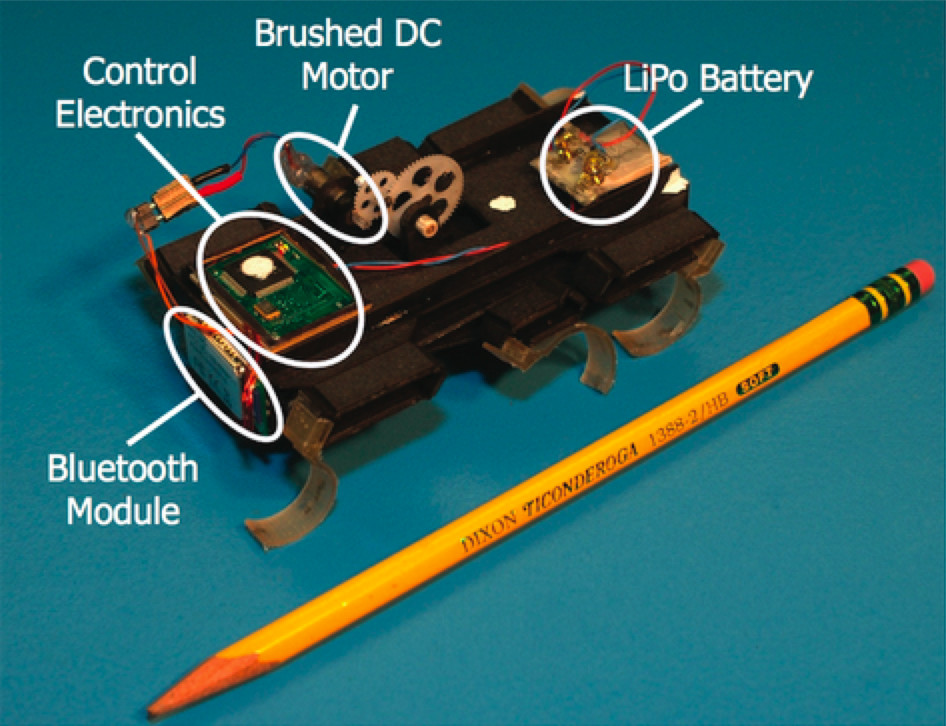
Scaled prototyping of a legged millirobots
Using
commonly
available, inexpensive
materials, it's possible to create folded prototypes of legged robots
with as many as 60 joints in about 1 hour. The prototypes can then be
actuated with DC motors or other types of actuators such as shape
memory alloy wire as shown in the photo to the right. Folding Prototyping
Fast
scale
prototyping for folded millirobots, ICRA 2008
|
 |
