Publicity information for:
K. Peterson, P. Birkmeyer, R. Dudley, R. S. Fearing
A wing-assisted running robot and implications for avian flight evolution,
Bioinspiration and Biomimetics, October 18, 2011
6 046008
Freely available online from Tuesday, October 18th at: http://iopscience.iop.org/1748-3190/6/4/046008
UC Berkeley researchers have recently developed DASH+Wings, a small
hexapedal winged robot that uses flapping wings to increase its
locomotion capabilities. Based on the Dynamic Autonomous Sprawled
Hexapod (DASH), the robot was developed to study the effects of
flapping wings on terrestrial locomotion. The impact of the flapping
wings on locomotion was quantified by measuring the speed across
horizontal surfaces, the maximum incline the robot could ascend, and
the glide performance in free flight. We also examined three control
configurations provided by wing removal, the use of inertially similar
lateral spars, and passive rather than actively flapping wings. Our
results showed that flapping wings provide an advantage over the
control experiments in nearly all facets of locomotion, improving the
horizontal speed, attainable incline, and glide slope.
Noticing that most prior theories on avian flight evolution are based
on incomplete fossil records and theoretical modeling, we determined
to find out if a hybrid robot could shed some light on the
matter. Prior theoretical models predicted that a ground-dwelling
animal would need to triple its running speed to allow for
takeoff. While the winged robot did improve its terrestrial
capabilities, it fell short of the necessary speed-up required to
enable flight. Combined with new fossil evidence, we concluded that
our robot lends more indirect evidence to the theory that flight
evolved from tree-dwelling gliders. Perhaps more importantly, we
believe that these experiments demonstrate the feasibility of using
robot models to test hypotheses of flight origins, and hope to
continue to use robotic models to illuminate the question of avian
flight evolution.
Point of Contact
Prof. Ronald S. Fearing, UC Berkeley; 510-642-9193; ronf @ eecs . berkeley . edu
Kevin Peterson, Ph.D. Candidate, UC Berkeley; 510-859-4457; kevincp @ eecs . berkeley . edu
This work was supported by the NSF Center of Integrated Nanomechanical Systems (PB) and the United States Army Research Laboratory under the Micro Autonomous Science and Technology Collaborative Technology Alliance (KP and RF) and NSF IOS-0837866 (RD).
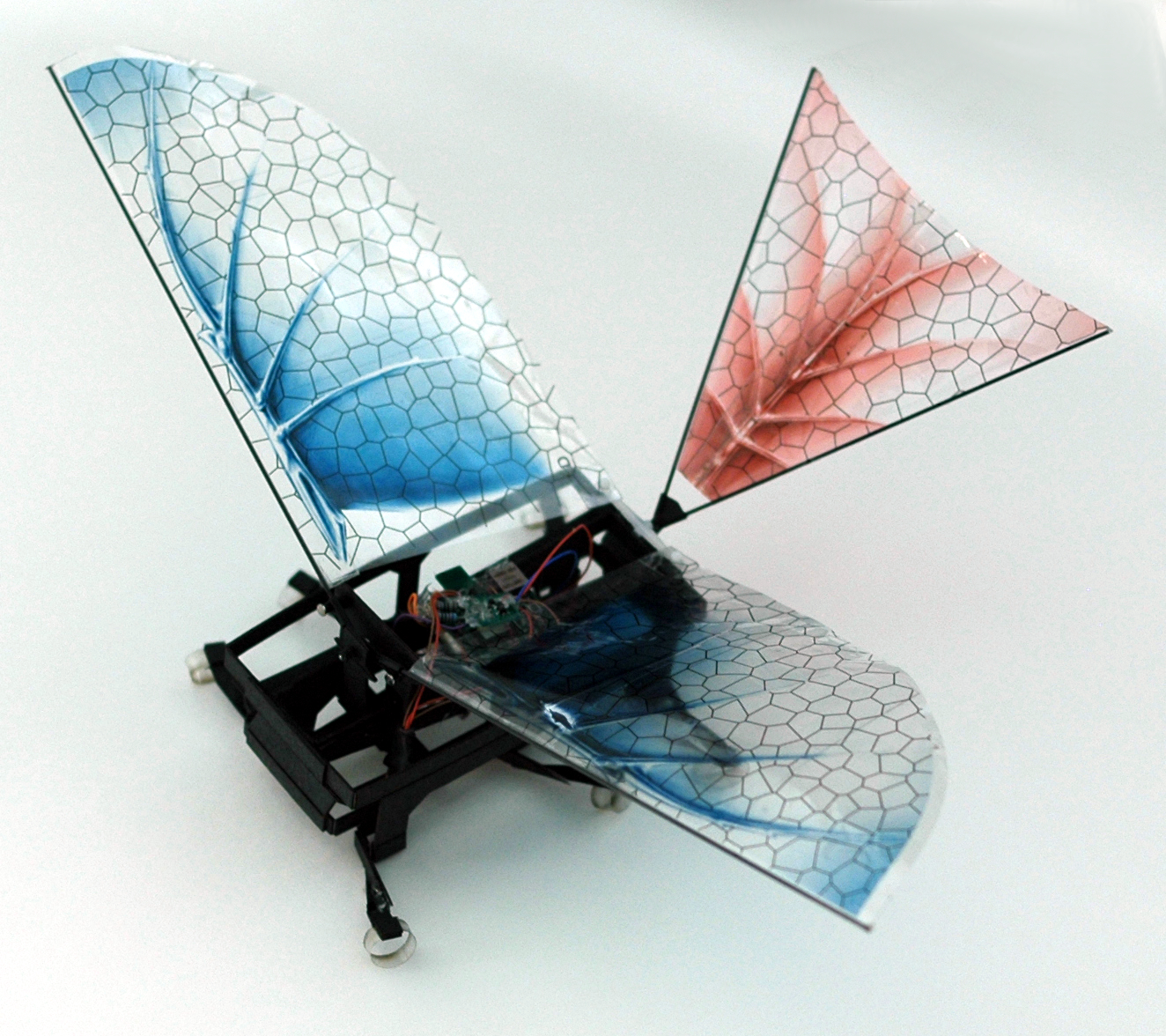
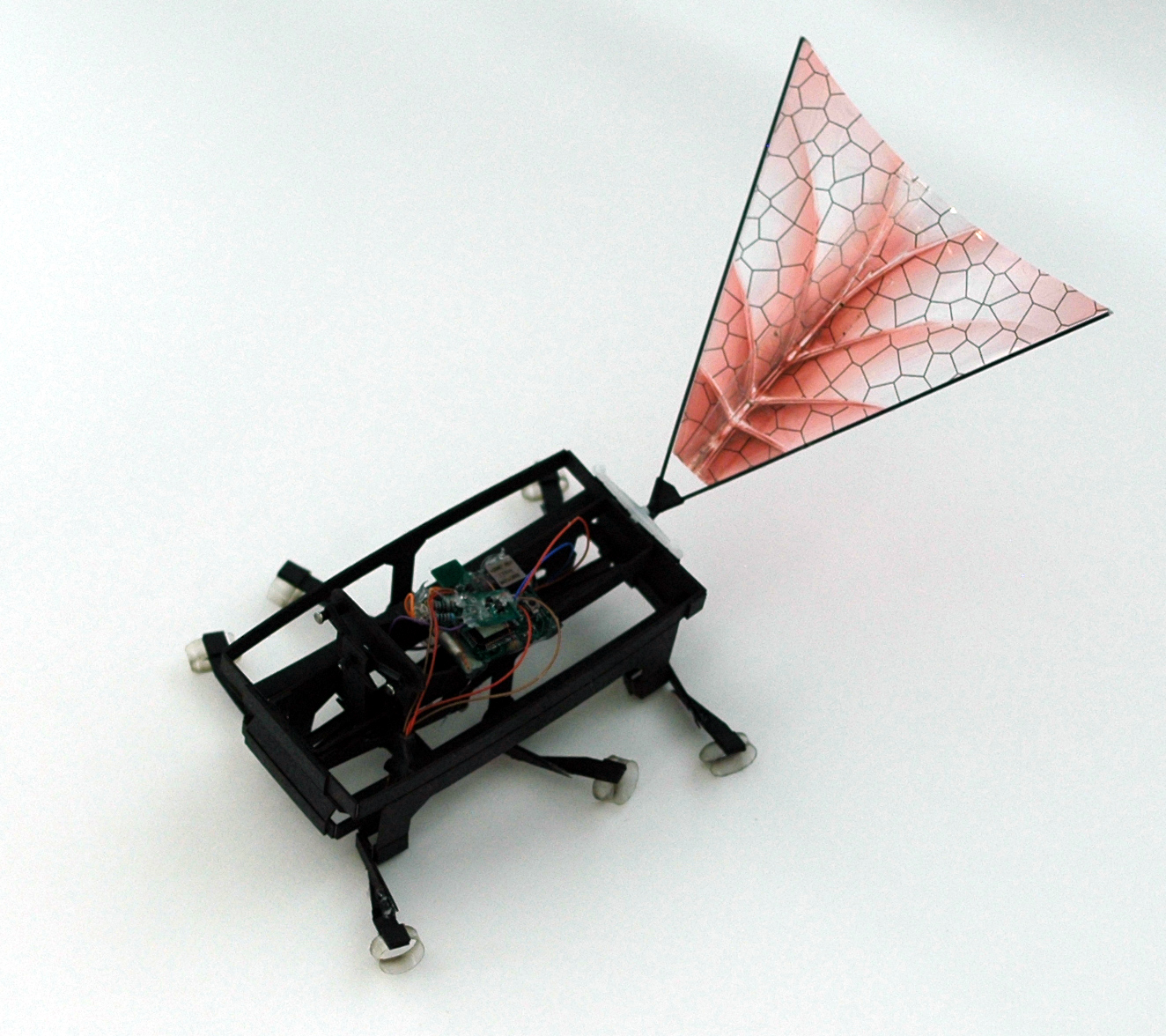
| A dynamic hexapedal robot with flapping wings (DASH+Wings) for (A) flapping wings configuration; (B) legs-only configuration and (C) inertial spars configuration. The fourth configuration (wings passive) is as in (A) but with the wing drive disconnected. |
 |
 |
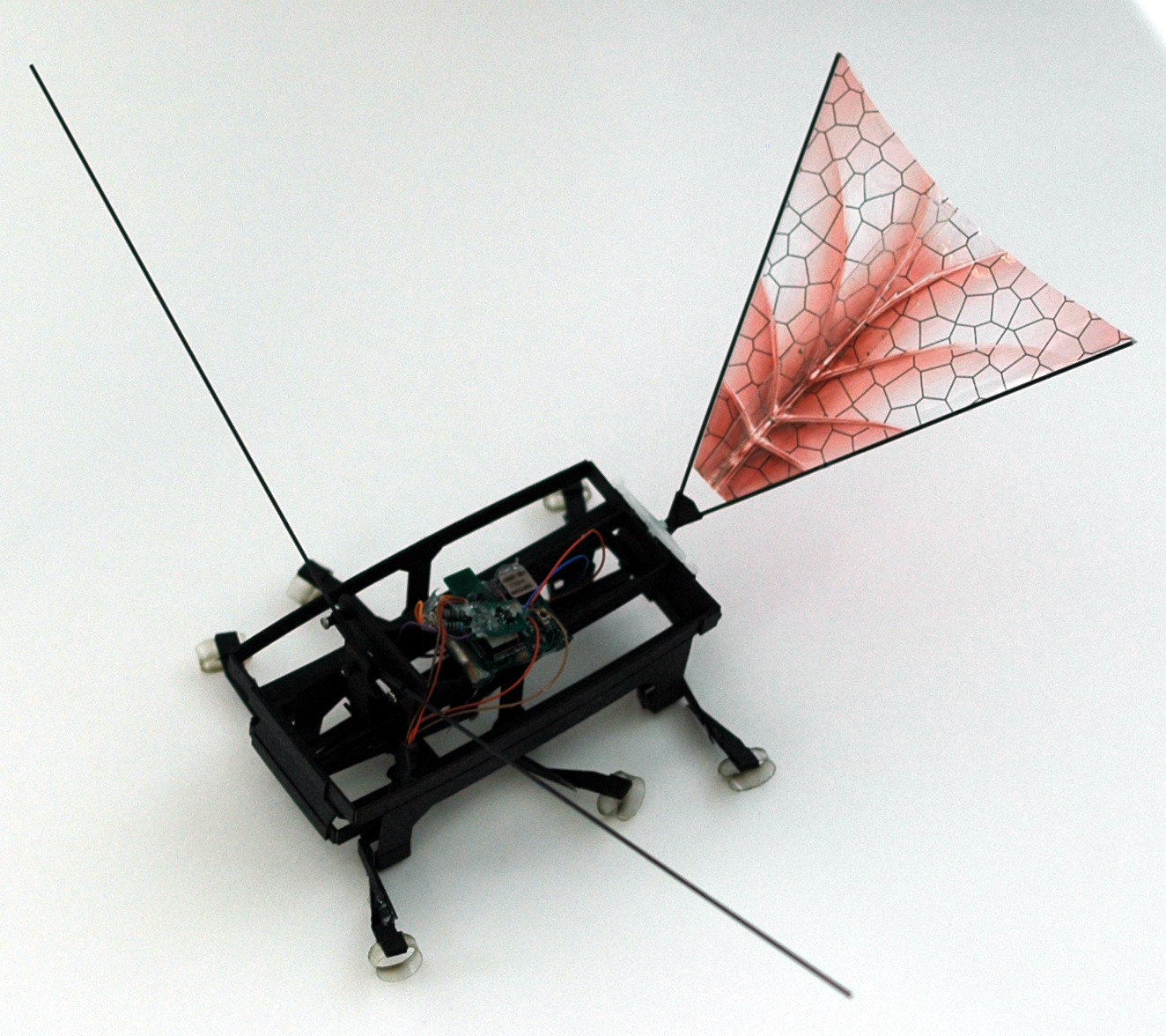 |
| (A) |
(B) |
(C) |
Engineering Design for Improved Performance
Adding flapping wings to a running robot provides several advantages for traversing complex environments. The wings increase the overall thrust of the robot, enabling it to accelerate faster, and ascend steeper inclines. Wing flapping also increases the stability of the robot when running along the ground, reducing the chances that an obstacle will cause the robot to flip over and potentially become incapacitated. Finally, the wings also add aerial stability to the robot, allowing it to glide through the air instead of falling vertically. They also ensure the robot will land on its feet, enabling it to continue its mission.
Implications for the Origins of Bird Flight
Various ideas as to how
birds initially evolved flight have been difficult to evaluate given
the absence of a detailed transitional fossil record. One possibility
is that wings evolved in tree-dwelling, gliding forms that flapped
their wings for weight support and maneuverability. For example,
precursors to early birds were characterized by flight feathers on all
four limbs, and were furthermore characterized by long feathered
tails, suggesting that they were gliding animals. Alternatively,
early birds may have been runners, moving either horizontally or up
inclined structures, such that wing flapping indirectly led to
enhanced running performance and ultimately to flight. Adding wings
to the DASH robot increased aerodynamic performance in gliding, and
also increased running performance, but not up to the speeds necessary
to attain takeoff either horizontally or on an incline. These
experimental results are thus more consistent with the aerial gliding
hypothesis for the origins of bird flight.
Applications
Winged robots have a multitude of both civilian and military applications, specifically in reconnaissance, exploration of hazardous areas, and search and rescue. In a situation such as a collapsed building, the area may be too dangerous for humans to move about safely. In this case the robot could enter the building through gaps humans may not be able to fit through and search for survivors. On the current robot, the wings allow for stable descent. It can jump from high areas and stably land on its legs at the bottom and continue searching. The wings also increase running stability as well as the range of inclines the robot can traverse, further increasing the likelihood of a successful mission. Future hybrid robots under development that are capable of taking off and flying will be able to reach more space in an area - when blocked from exploring further on the ground they can take off and search for alternative entry points.
Researchers
|
Kevin Peterson, Paul Birkmeyer, and Ronald S. Fearing
Biomimetic Millisystems Laboratory
Department of Electrical Engineering & Computer Science
University of California at Berkeley
|
Robert Dudley
Animal Flight Laboratory, Department of Integrative Biology
University of California at Berkeley
Smithsonian Tropical Research Institute, Balboa, Republic of Panama
|