|
Prototyping Folded Robots
Why Folded Robots?
|
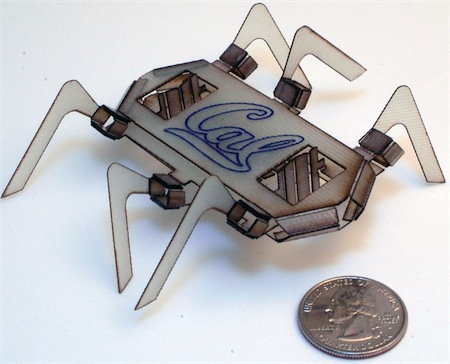
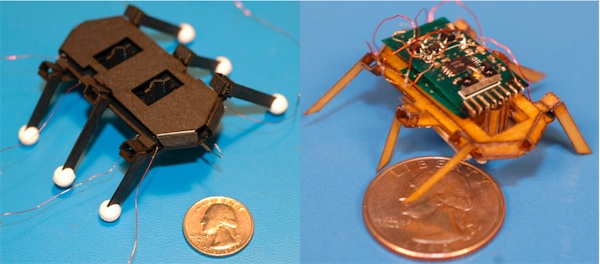 (left) 15 gram SMA driven robot, constructed from poster board
(left) 15 gram SMA driven robot, constructed from poster board
[Hoover and Fearing, ICRA 2008]
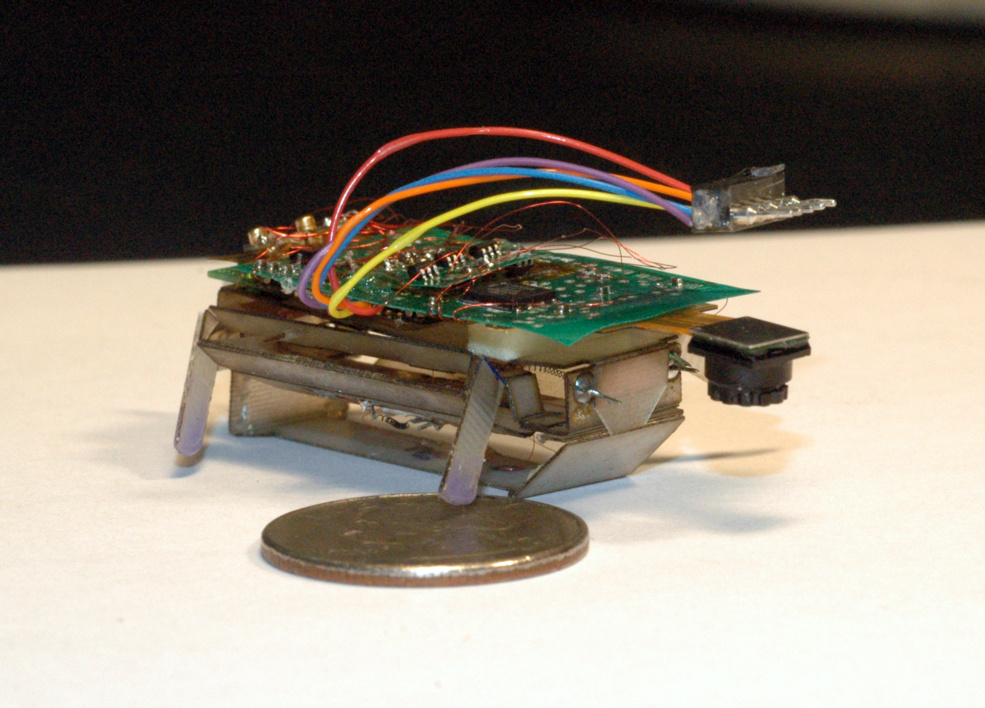
(right) 2.5 gram SMA driven robot with integrated electronics
[Hoover, Steltz and Fearing, IROS 2008]
As the size of a robot decreases, the ratio of its surface area to its
volume increases. Because the mass of a robot is proportional to its
volume, the increase in this ratio means that surface forces
(electrostatic attraction, for example) become large compared to
inertial forces.
So, as robots (and machines in general) become
smaller, friction in their moving parts can become a major source
of energy loss, wear, and unpredictable behavior. In the Biomimetic
Millisystems lab, we have developed a process called "Smart
Composite Microstructures" (SCM) that enables us to build small,
strong, lightweight,
robots and structures whose ability to move
comes from bending of compliant polymer hinges that connect rigid
links
made from carbon fiber and other composites. These structures
are made as single flat pieces and are folded up to form more
complicated shapes and linkages. They can also be integrated with
smart actuators like
piezoelectrics and shape memory alloy to
provide motion.
Details on the SCM process can be found in:
R.J. Wood, S. Avadhanula, R. Sahai, E. Steltz, R.S. Fearing
ASME Journal of Mechanical Design, vol. 130, no. 5, 2008.
Wood et al. ASME JMD 2008
For cardboard: SCM:
A.M. Hoover and R.S. Fearing,
A Fast Scale Prototyping Process for Folded Millirobots
IEEE Int. Conf. Robotics and Automation Pasadena, May 2008.
Hoover and Fearing ICRA 2008
|
Prototyping Folded Robots
|
Even with the SCM process, very small robots can be difficult to design and build. Their size makes assembly
challenging and the inherent difficulty of designing a 3 dimensional folded robot in a 2 dimensional drawing
also slows the process. To avoid costly errors in the early stages of design when many ideas will be tested
and discarded, we created a scaled analog to the SCM process using commonly available materials.
This scaled process lets the folded robot designer go from a design on paper to a functional scaled prototype
in as little as 20 minutes. Rapid iteration alleviates the risk of committing to a design and fabricating at the
small scale too soon. Instead, the designer is free to explore a variety of ideas at the larger scale,
discarding the unsuccessful attempts and rapidly integrating lessons learned in the process to produce a
design that is much more likely to succeed at the small scale.
Fab Process Movie
Movie of Crawler
|
|
The Prototyping Process: Step by Step Illustration with Hexapod Crawler Example |
Required Equipment and Supplies
- 2D CAD software (Solidworks, CorelDraw, etc)
- VersaLaser laser cutter
- Posterboard
- Glue stick/hot mount adhesive
- Polyester film (0.001" - 0.004" thick)
- Glue (white, or cyanoacrylate)
|
|
|
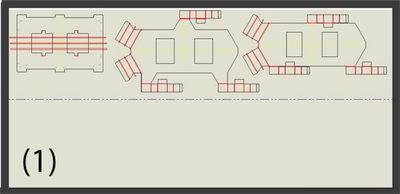
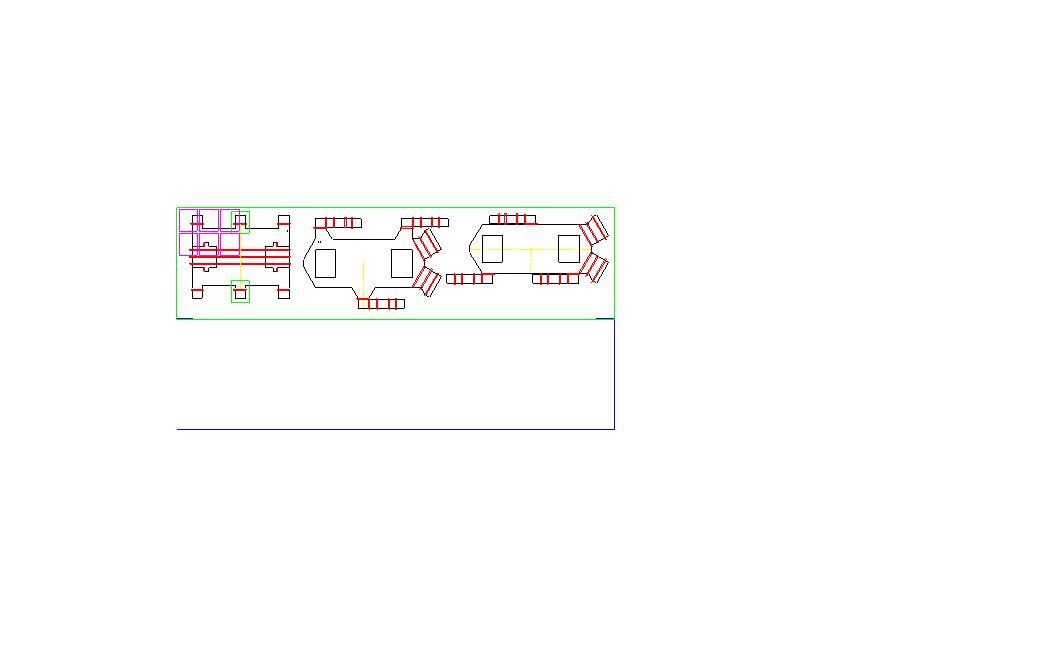
Step 1: The Drawing
The process begins with a 2 dimensional drawing in a program that supports vector graphics. In the lab we use
the 2D CAD program, Solidworks. It is also possible to use a program like Corel Draw. However, Solidworks is preferred
because it gives explicit control over dimensions and allows the user to define relations between entities within
the drawing. Lines that will become flexure hinges in the robot are colored red while lines representing
the outlines of the part are colored black. Blue lines are for squaring and scoring the workpiece. These lines are cut at
different times - the reason for this is explained in the following steps
|
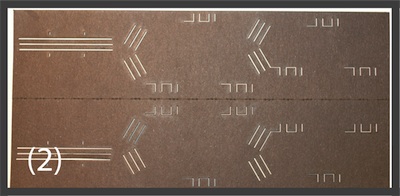
| Step 2: Cutting the Flexures
The blue lines are first cut out to square the workpiece and create a fold line in the middle. The workpiece is
folded and the flexure cuts are made, creating mirrored cuts in the workpiece shown in the picture to the right.
|
|
|
Step 3: Flexure Layer Insertion
Glue is spread over the
inner faces of the workpiece and a piece of polyester large enough to
cover all flexure cuts is placed over one of the inner faces.
(Alternatively, the posterboard can be prelaminated with hot mount film
on the inner faces.) The workpiece is folded up, sandwiching the
polyester film between the two sides. Care should be taken to align the
flexure cuts. Alignment can be checked by holding the folded piece up
to a light
|
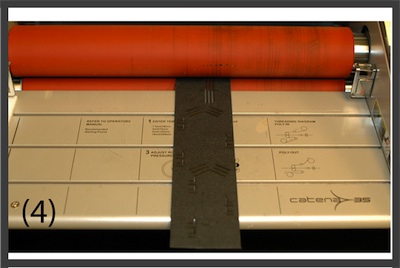
| Step 4: Laminating
The folded workpiece is passed through a hot laminator with maximum pressure exerted by the rollers. This step ensures
even bonding of the posterboard to the polymer flexure film. The resulting sandwich is now ready to have the part outlines
cut on the laser cutter.
|
|
|
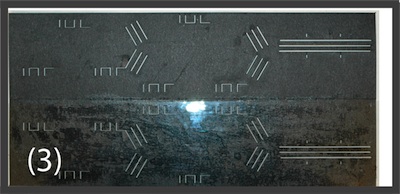
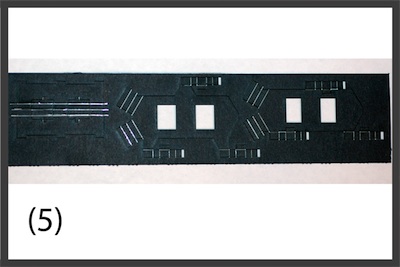
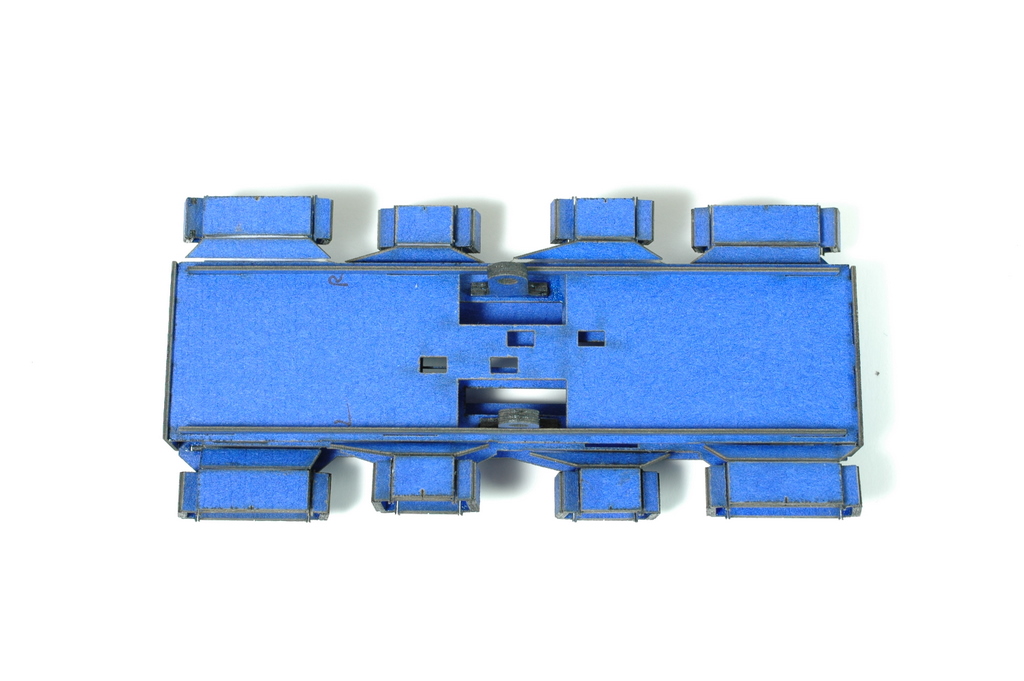
Step 5: Cutting the Outlines
The sandwich is placed
back in the laser cutter. It is important to place the workpiece back
in the same orientation as in Step 2 when the flexures were cut. The
outlines of the parts are cut now. The picture to the left shows the
parts with their outlines cut, but not removed from the workpiece.
|
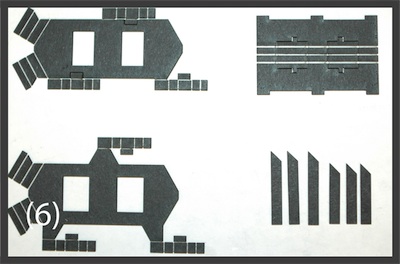
| Step 6: Releasing the Parts
The parts can now be popped out of the workpiece. The results are integrated, articulated parts with hinges where the
flexure cut lines were placed in the drawing and rigid posterboard links between.
|
|
|
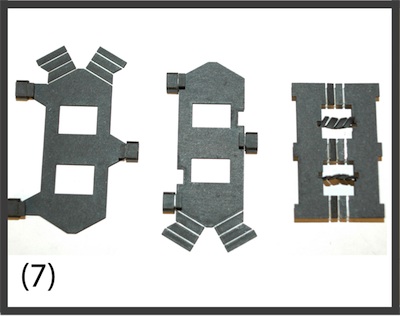
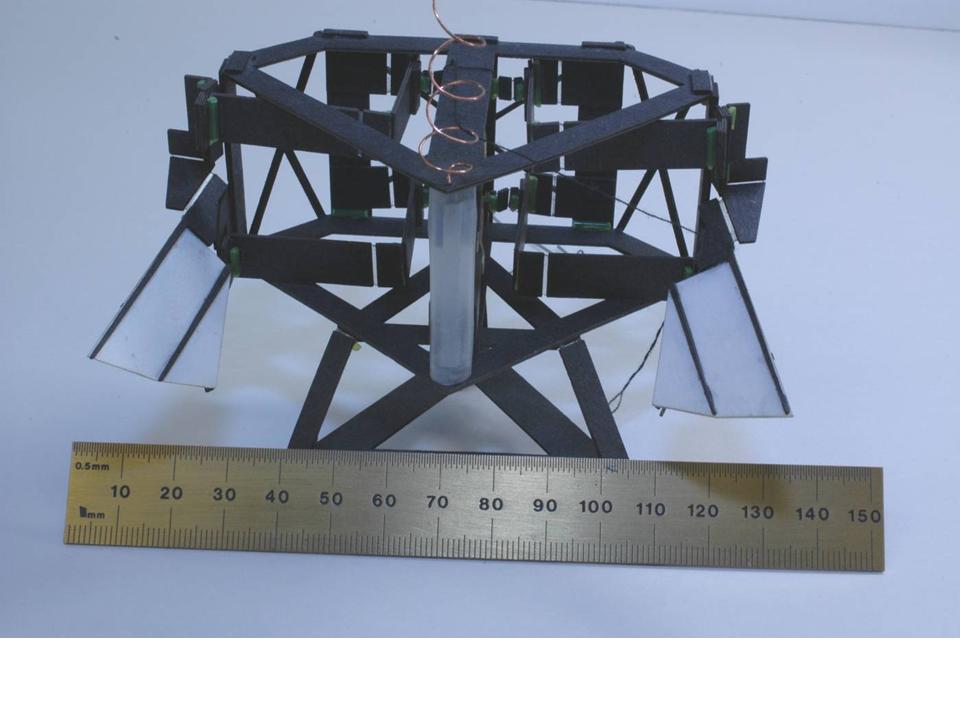
Step 7: Pre-folding Linkages
If any of the parts contain linkages that can be folded before the parts are joined, they can be folded and glued at this
point. In the picture on the left, fourbar linkages have been created by folding up the links attached to the two parts
on the left. These fourbars will form the hips of a six-legged robot when the entire structure is assembled.
The part on the right has been folded into a Sarrus linkage. This linkage sits in the middle of the finished
robot and by contracting and expanding serves to lift and lower the two sets of three legs (tripods).
|
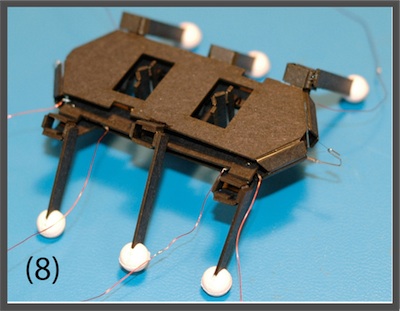
| Step 8: Final Assembly
Individual parts or subassemblies can now be assembled. In the photo on the right, the three plates from Step 7 are glued
together. The plate on the far left is on the bottom, the Sarrus linkage is in the middle,
and the plate in the middle of the picture in Step 7 is on top. Legs have also be glued to the fourbar hips
and the ends of the legs have been fitted with spherical silicone rubber feet.
|
|
Prototyping
using other Materials
|
 |
While posterboard is a convenient material that is readily
available, inexpensive, and reasonably strong, for actuated
models, a more robust engineering material is preferable. We
have recently extended this process to use G10 fiberglass. the
G10 provides a higher specific modulus than cardboard and is
more robust when subjected to repeated actuation cycles. The
use of fiberglass also opens the possibility of integrating
printed circuit boards directly into the robot's skeleton. |
|
|
|
,
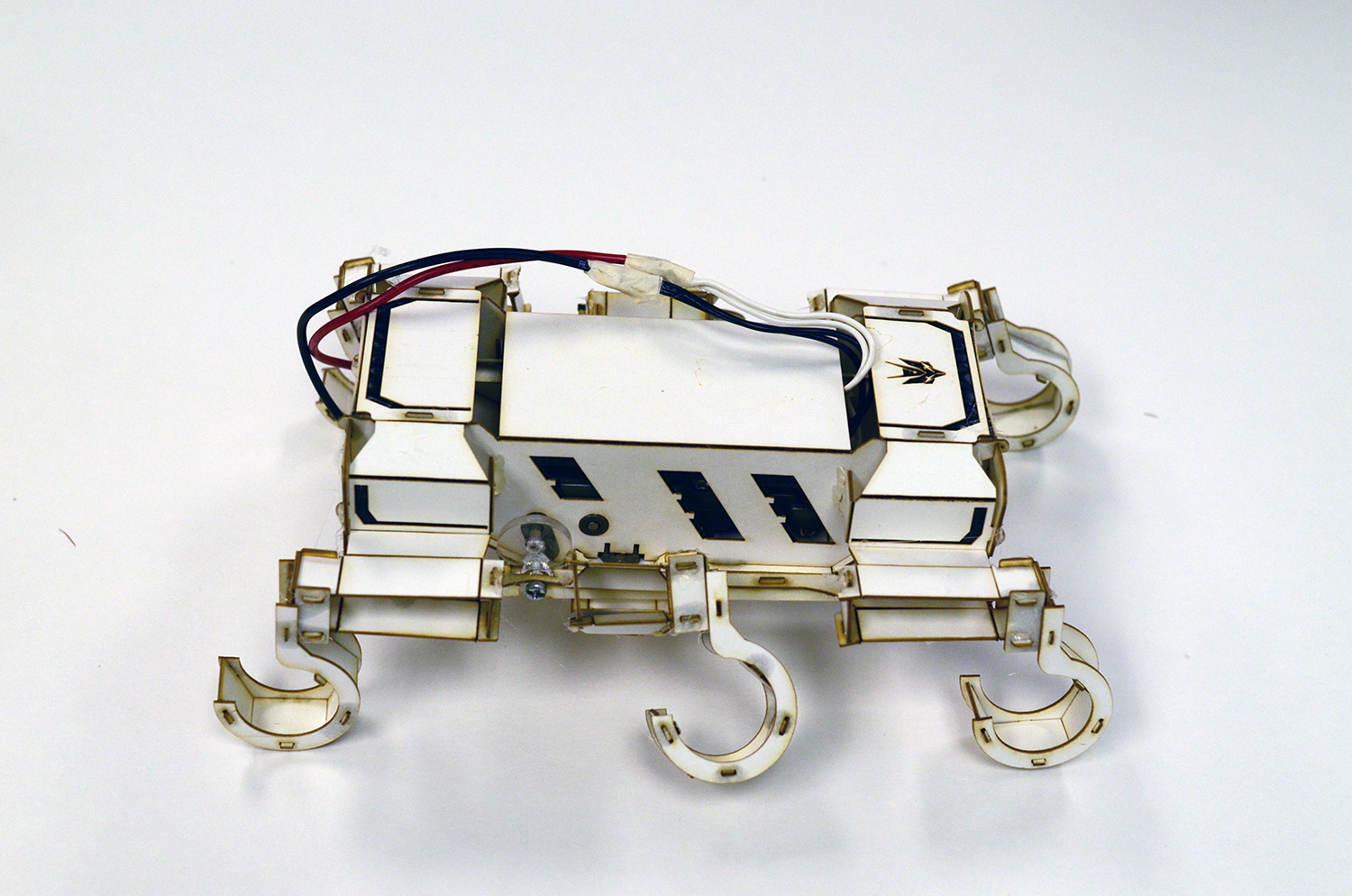
MEDIC Millirobot with
body-supported climbing
(Dec. 2010)
The Medic robot is fabricated from
thin fiberglass sheets, and has a
mass of 5.5 grams, and is capable of positioning within
1 mm using static SMA drive. The robot includes camera and wireless.
(Kohut et al. ICRA 2011.) |
|



{kind=link}