We
began developing flexonic components with a rapid-prototyping
system known as Fused Deposition Modeling (Stratasys, Inc.).
With FDM, fully functional passive devices can be made from
either rigid ABS plastic or flexible elastomer. Complex
parts with regions of overhang and irregular surfaces can
be easily built using a system that integrates build material
and sacrificial support material. We have built several
flexure-based designs using FDM. These devices are shown
in subsequent figures as a demonstration of flexonic components.
However, FDM has disadvantages when applied to the problem
of fabricating a broad range of flexonic devices, including
dielectric elastomer actuators. Few materials are available,
resolution is relatively poor, part strength and properties
are influenced by build orientation, and electronic components
are not realizable. An all inkjet printing process will
overcome these manufacturing obstacles.
Joints
One
of the requirements for most mechanical designs is some
form of rotary joint. We
have printed various joints and have identified several
designs for possible inclusion within flexonic mechanisms.
more
Higher-order mechanisms
While flexonics can provide a base set of simple mechanical
joints, it also encourages highly complex single-piece devices.
These include mechanisms for power transmission, motion
generation, and specilized functions.
more
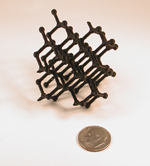
Structural volumes
Mechatronic devices need passive structural volumes to support
and connect moving components. In traditional designs, these
bulk volumes take on the form of three-dimensional solid
links or, at best, two-dimensional structures like honeycombs.
High strength-to-weight performance can be achieved through
one-dimensional trusses, but this is usually only feasible
on a large scale or through very expensive investment casting.
However, with flexonic manufacturing, we can print intricate
geometry to create lightweight truss and lattice volumes.
Actuators
We believe dielectric elastomer actuation is the most promising
technology for producing flexonic motion. When a large electric
field is applied across a thin dielectric elastomer film,
the resultant stress (Maxwell stress) squeezes the film
in thickness and expands it in area. This principle
can be applied to create light weight, highly energetic
actuators. One method of creating a planar actuator is to
sandwich a dielectric elastomer film between two supportive
frames.
more