| |
 |
|
|
 |
|
|
 |
|
|
|
|
|
Higher
Order Mechanisms:
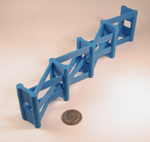
This transmission consists of a series connection
of cross-flexure joints, with additional interconnecting beam
flexures. When one cross-flexure joint is rotated, each of
the remaining joints exhibits rotation as well. As before,
the entire device is fabricated as one continuous piece. The
transmission also demonstrates another anticipated feature
of flexonics: modular construction. The flexonic transmission
is essentially a repeated pattern of cross-flexure joints.
Although this is only a one-dimensional pattern, we might
design other devices which contain a different modular unit
and employ two- or three-dimensional configurations.
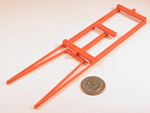
Traditional motion generation mechanisms can be redesigned
within the flexonics design space. As an example, consider
the Peaucellier linkage pictured below. The function of the
linkage is to convert rotational motion into pure translation.
Under traditional design methods, the links are separate parts,
connected to each other via pivots at their ends. The flexonic
counterpart, however, can be one continuous piece, with traditional
pivots being replaced by small-length flexures (also called
notch flexures or "living hinges").
 |
 |
Mechanisms for specific functions like gripping are also relatively
easy to design. One such possibility is shown above. Instead
of discrete regions of flexion as used above in the Peaucellier
linkage, we implement distributed flexion along the gripper
"fingers". A simple translation of the center rigid
beam brings both fingers together.
back
|
| |
|
 |
|
|
|
|