CS 284: CAGD
Lecture #2 -- Tue 8/28, 2012.
PREVIOUS
< - - - - > CS
284 HOME < - - - - > CURRENT
< - - - - > NEXT
Preparation:
read Rockwood: pp 20-48:
You should find access to a Windows machine and download the CAGD_LAB from:
http://www.cs.berkeley.edu/%7Esequin/CS284/CAGD_LAB/CAGD_LAB.rar
You can also use the workstations in 349 Soda Hall. (Account forms handed out in class)
- Draw the best curve through the given data!
Discussion:
- What do we know about the data?
- Is the data noisy? Should the curve really go through all data points -- or just pass close by? -- How close? - Do we know the error bars?
- What is known about the expected underlying shape of the curve? - Is it just one smooth branch -- or is there some "fine structure" on top of it?
How to Draw Interpolating (Smooth) Curves
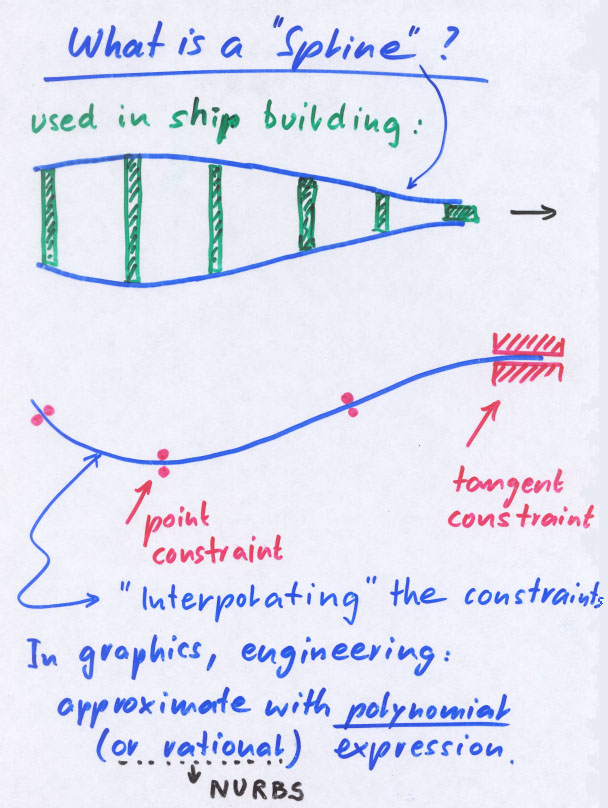
- What is a Spline (physical, mathematical) ?
-- a piece of physical material, such as a furring strip or a vinyl hose.
-- a simple linearized approximation of the actual (energy-minimizing) physical shape.
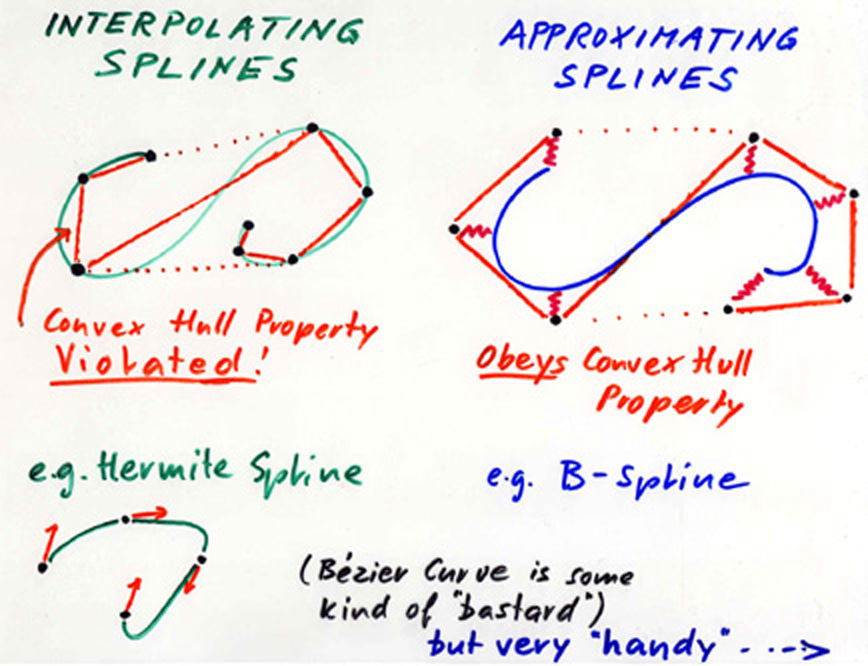
- Interpolating spline; goes through the dots.
-- mostly used in design tasks with a sparse set of data points.
-
Approximating spline; is "pulled towards" the dots.
-- mostly use in fitting to (noisy) data, e.g., from a scanner.
Bézier Curves
-
A very simple and very useful spline ...
- A mixture of interpolating (the two end points) and approximating (inner control points).
-
The defining control points: -- Quadratic case; -- Cubic case.
-
The general behavior
- Visualize properties with the applet in Ch3, (about 25% down).
-
n-th degree case
-
How much can we do with a curve of a particular degree ? -- See homework assignment below!
Bernstein Basis Functions
-
Formulas: in book, page 35, eqn 38. -- Symmetry in "t" and "(1-t)"
- Diagrams: check applet, page 36 (Ch3, 15% down); need to click on: "learn about Bernstein functions".
Basic Underlying Math;
-
(Cubic) Polynomial: infinitely differentiable --> Continuity = C-infinity
-
Cubic Hermite Spline: 2 endpoints, 2 tangent directions.
-
Cubic Bezier Curve: 2 endpoints, 2 approximated intermediary control
points.
-
-- (P1,P2) = 1/3 of starting velocity vector
-
-- (P3,P4) = 1/3 of ending velocity vector
Understanding the Properties of Bézier Curves
-
Endpoint Interpolation
-
Look at basis functions; check cases for t=0 and t=1.
-
Tangent Condition
-
Look at the basis functions; differentiate.
-
Convex Hull
-
Partition of unity; only interpolation -- not extrapolation.
-
Linear Precision
-
Special case of convex hull property: Curve can collapse onto a line.
-
Affine Invariance
- Splines are based
on linear operators. A linear transformation (rotation, skewing,
scaling) of the control points leads to a corresponding transformation
of whole curve.
- Back-to-front Symmetry
- If control polygon is used in reverse order, the same shape results. (NOT true for some quaternion splines on sphere).
-
Variation Diminishing
- Any line cannot intersect with the spline more often than with its control polygon.
- What can we say about the number of inflection points ?
Drawing Bézier Curves: de Casteljau Algorithm ( "cass - tell - sho" )
-
How NOT to evaluate a Bezier curve:
- by explicitely calculating a polynomial in the powers of t.
-
Finding
curve points by interpolation
-
Recursive linear interpolation (p46).
-
An efficient pipelining scheme, fast and robust!
-
Finding Tangent Directions at various locations
-
Subdivision: Split curve at value t into two segments; find the control polygons for both segments.
-
New control points come directly from de Casteljau algorithm.
-
Use of subdivision for clipping to a boundary.
-
Use of subdivision for curve refinement.
New Homework: What can you do with Bézier Curves?
Use Rockwood's Interactive Curve Editor CAGD_LAB. Open the applet shown on page 52 of the
book (Ch3, 70%down),
labelled "Higher Degree Bezier Curves" for the following tasks:
-
Using a septic (heptic) Bézier curve {this is degree 7, order 8; using 8 ctrl pts;
==> different ways of saying the same thing},
model G-1 continuous {continuous tangent directions} closed loops of as many
different turning numbers as possible
{the # of times the tangent vector sweep around
360 degrees} -- Do it at least for turning numbers 0, 1, 2.
-
Using the minimum number of control points (= minimum order Bezier), make
a G1-continuous "figure-8" Bezier curve with overall C2-point-symmetry
{= 2-fold rotational symmetry around a point that will bring the figure
back onto itself after a 180-degree rotation around this point}.
DUE: THU 8/30/12, 2:40pm.
Hand in: window snapshots showing your solutions;
label your figures with their turning numbers;
put your name on your hand-ins;
add explanatory comments as necessary.
On the PCs you can hit Alt+PrnScrn to capture the current active window
to the clipboard.
You can then paste the clipboard into a program such
as "paint" and from there readily send it to the printer.
"SnagIt" is another
great screen/window/region-saving application that you can download.
Recent Homework Discussion
Quick Review of Some Important Concepts
-
Hodograph:
-- plot of parameterized derivative vector in its own coordinate system.
-- if hodograph goes through origin, curve velocity goes to zero; this often leads to a cusp.
-- Control polygon for hodograph of a Bézier curve.
-
Winding Number of a (closed, oriented) Curve around a Point:
-- how many times does it loop around that point ?
-- a crucial quantity to determine the "inside" of self-intersecting polygons.
-- only curves with the same winding number can be smoothly transformed into one another in the plane.
-
Turning Number of a (closed) Curve:
-- counts the (signed) number of turns made by the tangent vector of the curve.
-- if v<>0 it is equal to the winding number of hodograph around the origin. -
Cn Parametric Continuity:
-- first n derivatives are continuous;
curve is n-th order differentiable,
-- but the curve may still have cusps where v=0.
-
Gn Geometric Continuity:
-- is determined entirely by the visual appearance of the shape of the curve (ignoring parametrization).
-- first n-order geometric approximations
(tangent, curvature, ...) vary smoothly with arclength.
Administrative Comments
- Class Roster, Accounts, etc. -- everybody on the wating list will be admitted.
- Just "auditing" this course is _not_ a great idea!
-- to get something out of this course you really need to do the work -- and then you may as well get credit for it!
Next Reading Assignment:
Rockwood: pp 31-58.
PREVIOUS
< - - - - > CS
284 HOME < - - - - > CURRENT
< - - - - > NEXT
Page Editor: Carlo H. Séquin
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}