All control software was written in Linux, using tools such as gcc,
xxgdb, XForms for the UI, etc. Below pictures of the various UI panels are
shown.
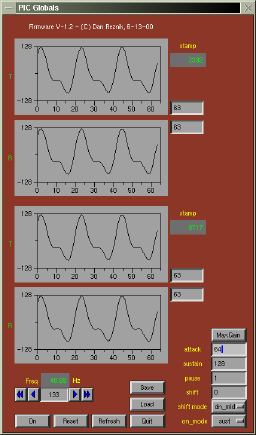 |
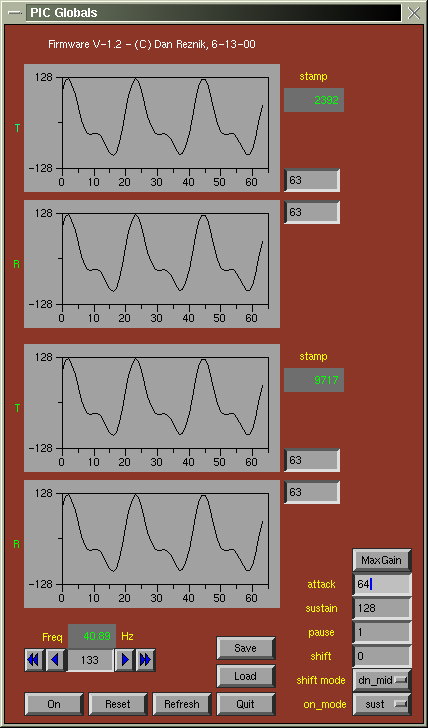
"PIC Globals" UI: allows the user to peruse all RAM entries
stored in each of the two PIC microcontrollers in the interface
board. The four graphs on the left are the signals (two 64-sample
waves per PIC) sent to the motors. The lower right corner shows the
signal enveloping parameters (attack, sustain, pause). The signal's
frequency is controlled on the lower left corner. |
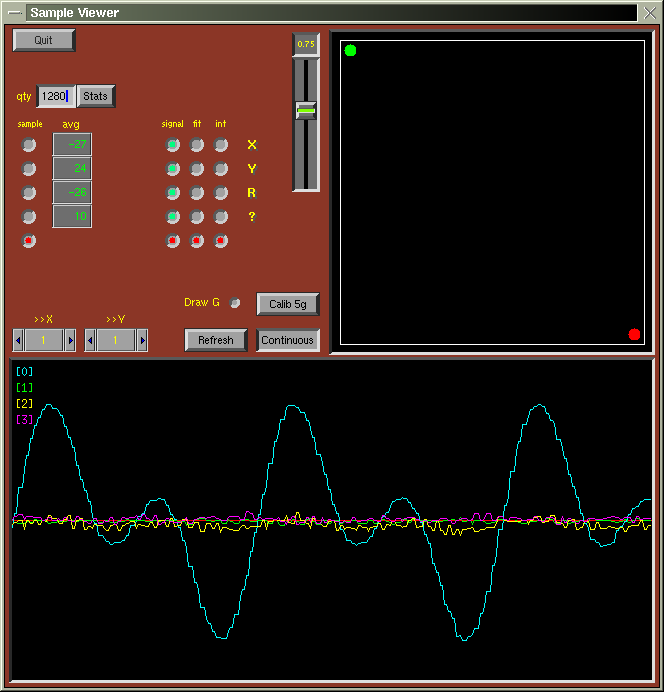
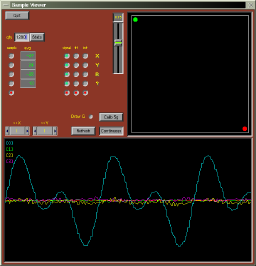
| "Sample Viewer" UI: allows user to visualize, in real time,
signals measured by two accelermoters (4 axes total). The top half
contains selectors for which of the four signals are shown in the lower
half. The program automatically fits sinusoidal waveforms to the
measured signals. |
 |
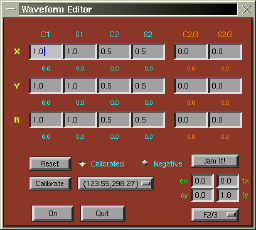 |
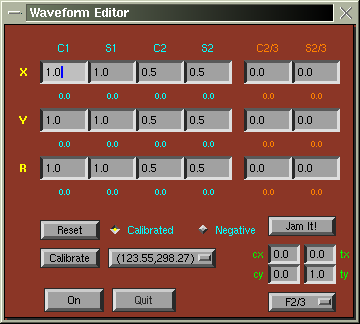
"Waveform Editor" UI: here the user is able to manually
enter amplitudes for 18 different sinusoidal components, grouped as sine
and cosine of 1st, 2nd, and 2/3rds harmonics (top half). The lower right
corner also allows for the quick setting of "jet/jam field"
parameters. |
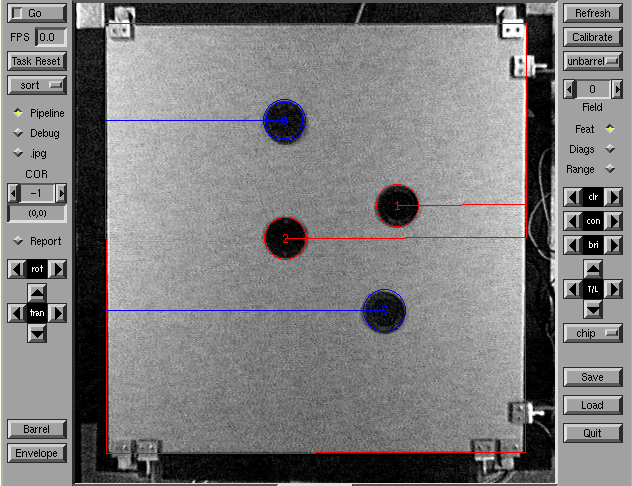
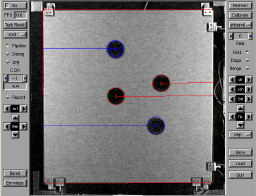
| The main UI: the center contains the real-time overhead camera view;
in this case, prior to a color sorting example -- poker chips are
located and labeled according to color. their desired paths are shown by
the straight lines. |
 |
|