|
|
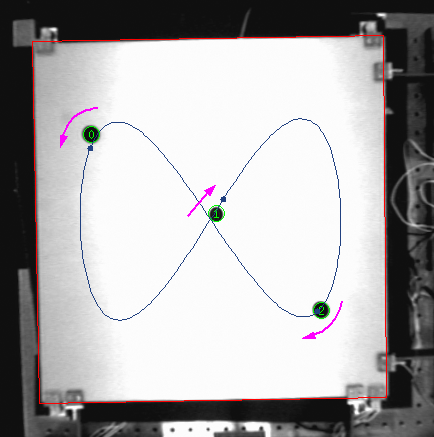
Here we present an example of the generic type of parallel manipulation achievable with the Universal Parts Manipulator (UPM): 3 pennies are placed on the device, equally spaced along a figure-eight curve (the "bowtie"). The intent is to have all coins flow simultaneously along this curve, thus proving that a clearly non-rigid, coordinated rearrangement of several objects in the plane is possible. The image below is what the system sees thru its overhead camera at the starting point of execution: the coins are the dark disks labeled 0, 1, 2; they are placed on the bowtie path at 2p/3 intervals; this distance is to be preserved during the motion.
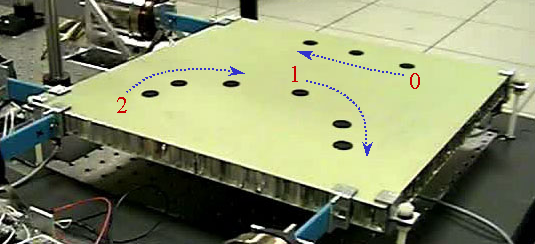
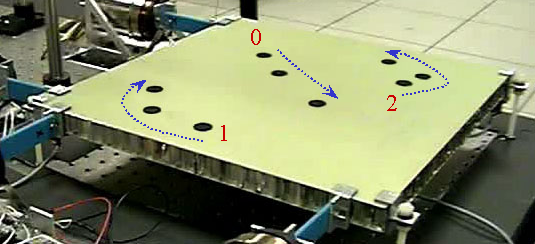
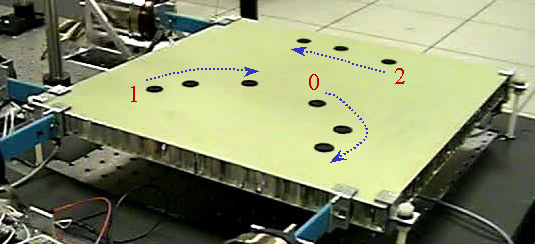
A control loop is run which routes all three coins simultaneously along the bowtie curve. This illustrates how the UPM, a 3-dof device, can be used to manipulate a system with a higher number of dof's (6 in this case). Pictures of the motion are shown below; each combines 3 consecutive snapshots taken at regular intervals. Coins are identified by a number (0,1,2); displacement arrows indicate their displacement.
Several snapshots are superimposed below showing the bowtie-curve traced by the 3 coins.
A movie of this curious motion, as it is physically executed by the UPM, is available below:
Also: pictures of the UPM are available here; videos of the motion primitives used in this demo are available here. |
| © 2000 Dan S. Reznik, <dreznik@cs.berkeley.edu> |