|
|
|
 |
Robust 3D natural gesture recognition for wearable
Android platforms.
As the first employee and part of the founding team, I
served various functions at Atheer. My primary
responsibilities were developing 3D sensing and augmented
reality algorithms for Atheer's wearable 3D platform. My
team developed a real-time 3D natural gesture recognition
algorithm on ARM-based Android platforms that was regarded
as the best mobile gesture recognition solution. Our
proprietary augmented reality algorithms provided
industry-leading low latency and accurate 3D localization
performance. In 2014, I also served as Acting COO overseeing
the overall operation of the company.
Video Demo: https://www.youtube.com/watch?v=Rp6iawf0Dgk
Atheer Labs is features in the following reports:
|
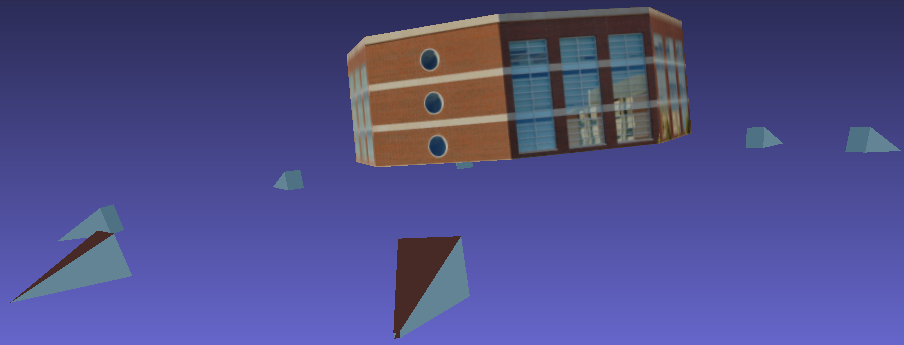 |
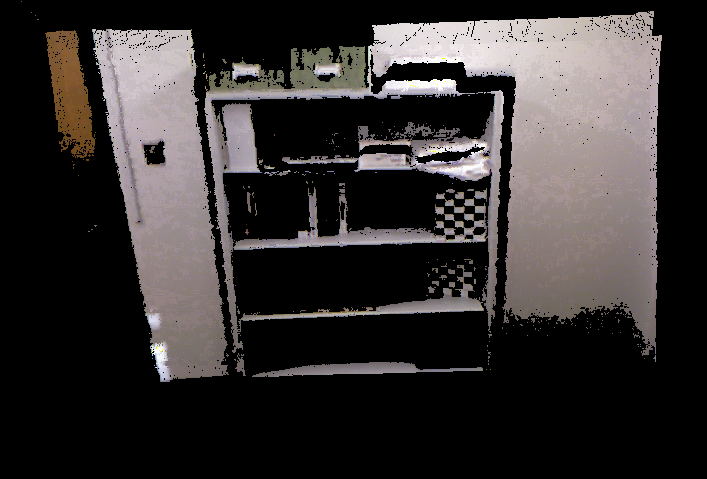
Large-scale
3-D Reconstruction of Urban Scenes via Low-Rank Textures
We introduce a new approach to reconstruct
accurate camera geometry and 3-D models for urban
structures in a holistic fashion without relying on
extraction of matching of traditional local features
such as points and edges. Instead, the new method relies
on a new set of semi-grlobal or global features called transform invariant
low-rank texture (TILT), which are ubiquitous
in urban scenes. Modern high-dimensional optimization
techniques enable us to accurately and robustly recover
precise and consistent camera calibration and scene
geometry from a single or multiple images of the scene. |
 |
CPRL:
An Extension of Compressive Sensing to the Phase
Retrieval Problem
This paper
presents a novel extension of CS to the phase
retrieval problem, where intensity measurements of a
linear system are used to recover a complex sparse
signal. We propose a novel solution using a lifting
technique -- CPRL, which relaxes the NP-hard problem to a nonsmooth
semidefinite program. Our analysis shows that CPRL
inherits many desirable properties from CS, such as
guarantees for exact recovery. We further provide
scalable numerical solvers to accelerate its
implementation.
Matlab Code: http://users.isy.liu.se/rt/ohlsson/code.html
arXiv Tech Report: http://arxiv.org/pdf/1111.6323.pdf
|
 |
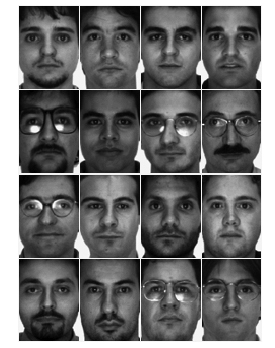
L-1 Minimization via
Augmented Lagrangian Methods and Benchmark
We provide a comprehensive review of five
representative approaches, namely, Gradient Projection,
Homotopy, Iterative Shrinkage-Thresholding, Proximal
Gradient, and Augmented Lagrangian Methods. The work is
intended to fill in a gap in the existing literature to
systematically benchmark the performance of these
algorithms using a consistent experimental setting. In
particular, the paper will focus on a recently proposed
face recognition algorithm, where a sparse representation
framework has been used to recover human identities from
facial images that may be affected by illumination,
occlusion, and facial disguise. |
 |
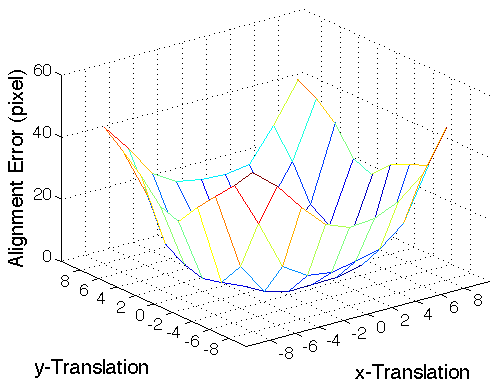
SOLO:
Sparse Online Low-Rank Projection and Outlier
Rejection
Motivated
by
an emerging theory of robust low-rank matrix
representation, we introduce a novel solution for
online rigid-body motion registration. The goal is to
develop algorithmic techniques that enable a robust,
real-time motion registration solution suitable for
low-cost, portable 3-D camera devices. The accuracy of
the solution is validated through extensive simulation
and a real-world experiment, while the system enjoys
one to two orders of magnitude speed-up compared to
well-established RANSAC solutions.
|
 |
Sparse PCA via Augmented
Lagrangian Methods and Application to Informaitve
Feature Selection
We propose a novel method to select informative object
features using a more efficient algorithm called Sparse
PCA. First, we show that using a large-scale multiple-view
object database, informative features can be reliably
identified from a high-dimensional visual dictionary by
applying Sparse PCA on the histograms of each object
category. Our experiment shows that the new algorithm
improves recognition accuracy compared to the traditional
BoW methods and SfM methods. Second, we present a new
solution to Sparse PCA as a semidefinite programming
problem using the Augmented Lagrangian Method.
Source code in MATLAB: http://www.eecs.berkeley.edu/~yang/software/SPCA/SPCA_ALM.zip |
 |
d-Oracle: Distributed
Object Recognition via a Camera Wireless Net
Harnessing the multiple-view information from a wireless
camera sensor network to improve the recognition of
objects or actions.
Berkeley Multiview
Wireless (BMW) database now available! |
 |
d-WAR: Distributed Wearable Action Recognition
We propose a distributed recognition method to classify
human actions using a low-bandwidth wearable motion sensor
network. Given a set of pre-segmented motion sequences as
training examples, the algorithm simultaneously segments
and classifies human actions, and it also rejects outlying
actions that are not in the training set. The
classification is distributedly operated on individual
sensor nodes and a base station computer. Using up to
eight body sensors, the algorithm achieves
state-of-the-art 98.8% accuracy on a set of 12 action
categories. We further demonstrate that the recognition
precision only decreases gracefully using smaller subsets
of sensors, which validates the robustness of the
distributed framework.
Wearable Action
Recognition Database (WARD) ver 1.0 available for
download. |
 |
Image
Analysis and Segmentation via Lossy Data Compression
We cast natural-image segmentation as a problem of
clustering texure features as multivariate mixed data. We
model the distribution of the texture features using a
mixture of Gaussian distributions. Unlike most existing
clustering methods, we allow the mixture components to be
degenerate or nearly-degenerate. We contend that this
assumption is particularly important for mid-level image
segmentation, where degeneracy is typically introduced by
using a common feature representation for different
textures in an image. We show that such a mixture
distribution can be effectively segmented by a simple
agglomerative clustering algorithm derived from a lossy
data compression approach. |
 |
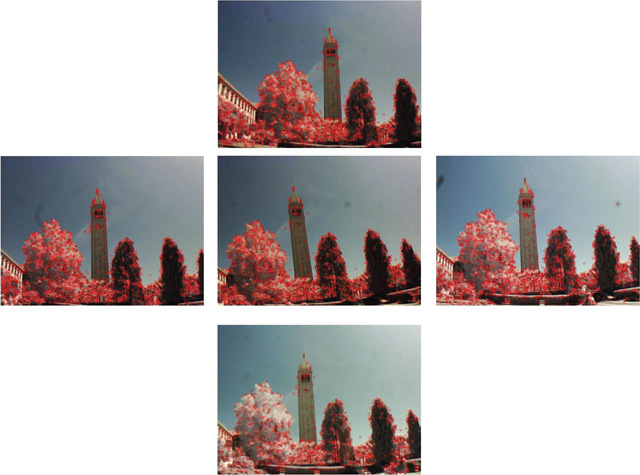
Feature
Selection in Face Recognition: A Sparse Representation
Perspective
Formulating the problem of face recognition under the
emerging theory of compressed sensing, we examine the role
of feature selection/dimensionality reduction from the
perspective of sparse representation. Our experiments show
that if sparsity in the recognition problem is properly
harnessed, the choice of features is no longer critical.
What is critical is whether the number of features is
sufficient and whether the sparse representation is
correctly found. |
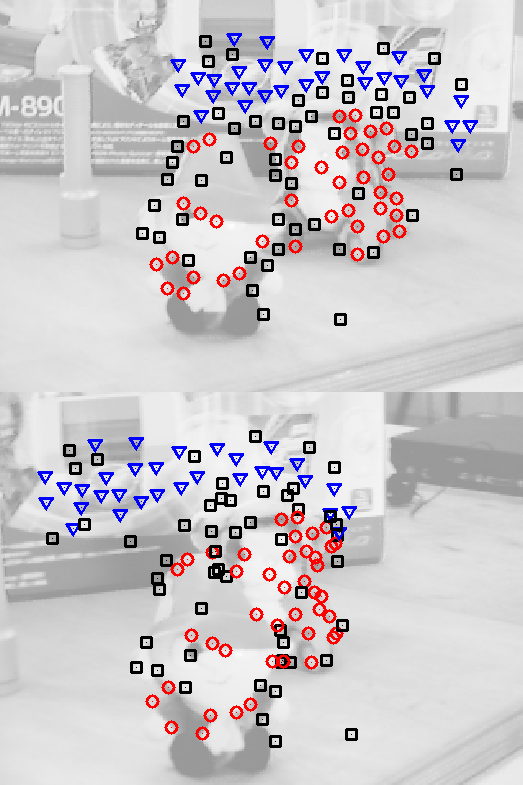 |
Robust Algebraic Segmentation of Mixed
Rigid-Body and Planar Motions in Two Views
We study segmentation of multiple rigidbody
motions in a 3-D dynamic scene under perspective camera
projection. Based on the well-known epipolar and
homography constraints between two views, we propose a
hybrid perspective constraint (HPC) to unify the
representation of rigid-body and planar motions. Given a
mixture of K hybrid perspective constraints, we propose an
algebraic process to partition image correspondences to
the individual 3-D motions, called Robust Algebraic
Segmentation (RAS). We conduct extensive simulations and
real experiments to validate the performance of the new
algorithm. The results demonstrate that RAS achieves
notably higher accuracy than most existing robust motion
segmentation methods, including random sample consensus
(RANSAC) and its variations. The implementation of the
algorithm is also two to three times faster than the
existing methods.We will make the implementation of the
algorithm and the benchmark scripts available on our
website.
|

|
Generalized
Principal Component Analysis (GPCA)
An algebraic framework for modeling and segmenting
mixed data using a union of subspaces, a.k.a. subspace
arrangements. Yet the statistical implementation of the
framework is robust to data noise and outliers.
|
|
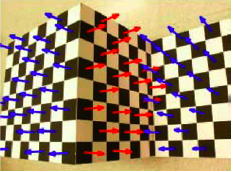
Symmetry-based
3-D Reconstruction from Perspective Images
We investigated
a unified framework to extract poses and structures of
2-D symmetric patterns from perspective images. The
framework uniformly encompasses all three fundamental
types of symmetry: Reflection, Rotation, and
Translation, based on a systematic study of the
homography groups in image induced by the symmetry
groups in space.
We claim the following principle: If a planar object
admits rich enough symmetry, no 3-D geometric
information is lost through perspective imaging.
|
|
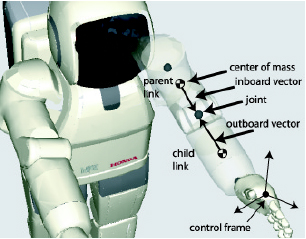
RoboTalk
A unified robot motion interface and tele-communication
protocols for controlling arms, bases, and androids.
Copyright (c) Honda Research, Mountain View, CA.
|