
- Phoebus Chen, Parvez Ahammad, Colby Boyer, Shih-I Huang, Leon Lin, Edgar Lobaton, Marci Meingast, Songhwai Oh, Simon Wang, Posu Yan, Allen Yang, Chuohao Yeo, Lung-Chung Chang, Doug Tygar, and Shankar Sastry. CITRIC: A low-bandwidth wireless camera network platform. ICDSC, 2008. [PDF]
- Phoebus Chen, Kirak Hong, Nikhil Naikal, Shankar Sastry, Doug Tygar, Posu Yan, Allen Yang, Lung-Chung Chang, Leon Lin, Simon Wang, Edgar Lobaton, Songhwai Oh, Parvez Ahammad. A low-bandwidth camera sensor platform with applications in camera sensor networks. ACM TOSN, 2012. [PDF]

Please note that the above software is provided "AS IS" for the CITRIC platform. No technical support will be provided at this time.
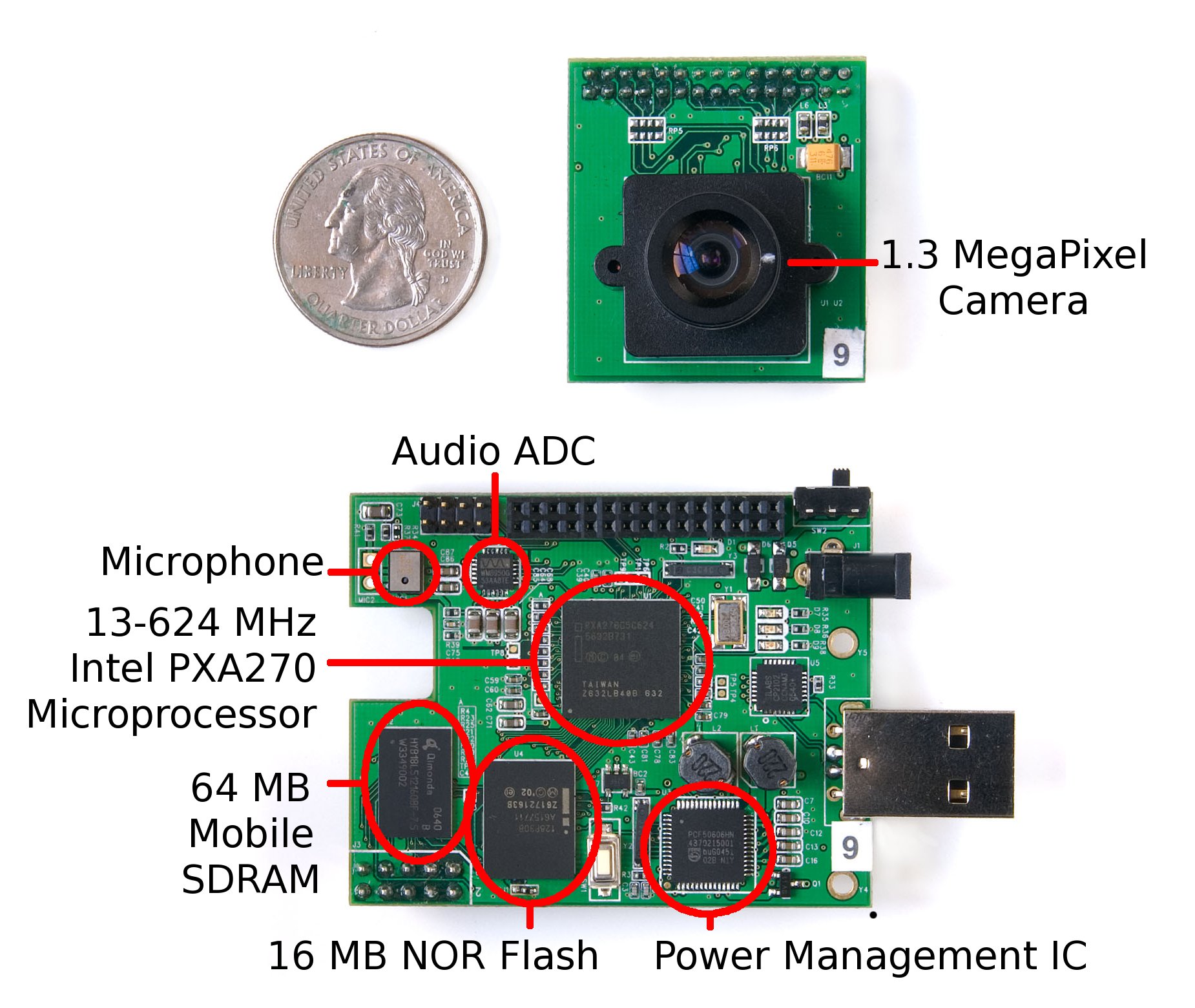

Figure 1: Left: Camera daughter
board with major functional units outlined. Right: Assembled camera
daughter board with Tmote sensor network board.
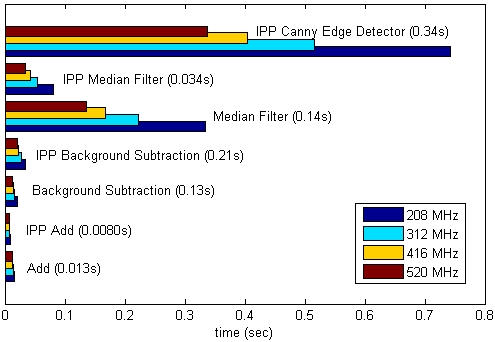
Figure 2: Average run time of basic image processing functions available on the CITRIC mote. All experiments are on 512-by-512 images. Execution time at 520 MHz processor speed is shown in parentheses.
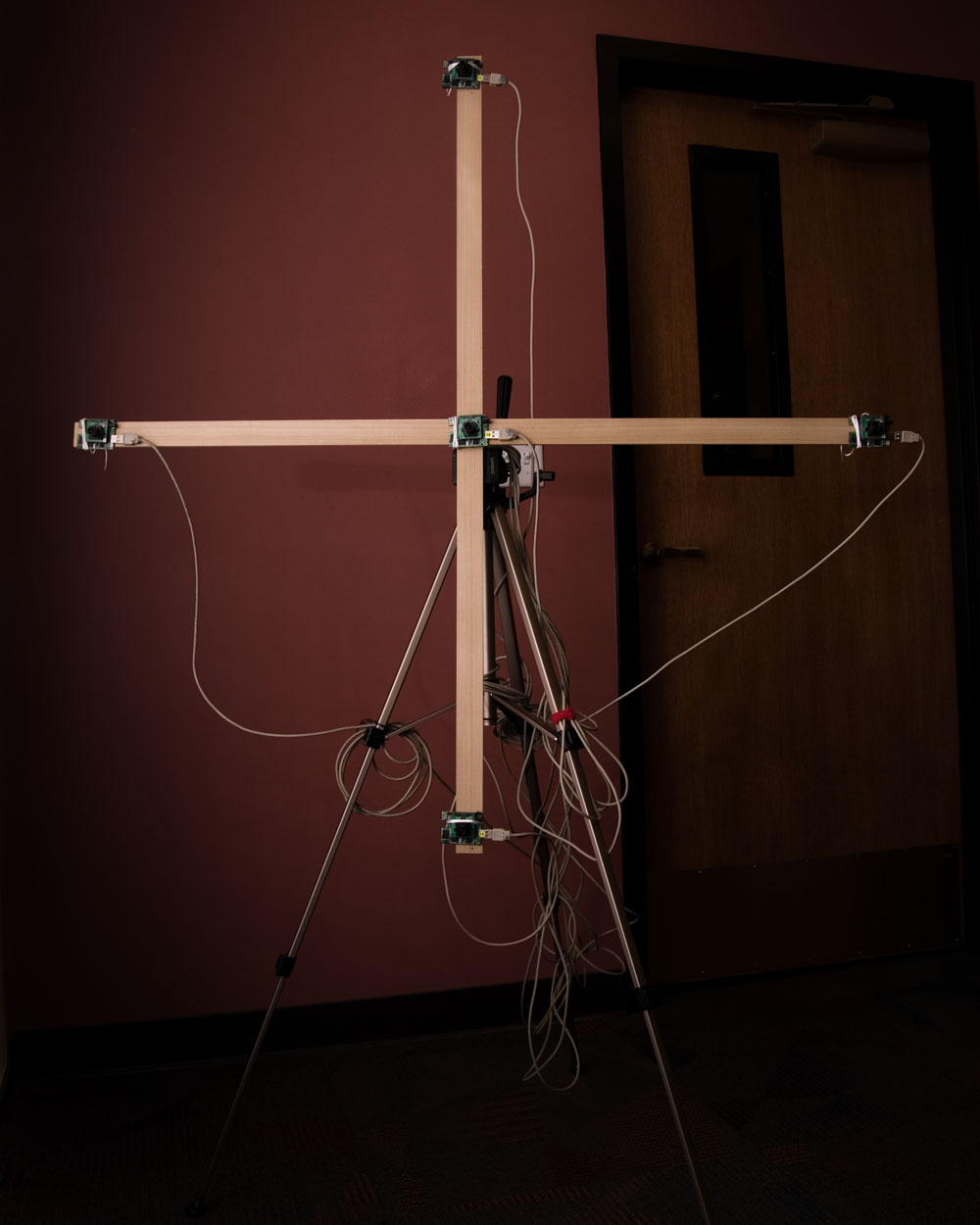 |
The BMW Database consists
of multiple-view images of 20 landmark
buildings on the campus of the University of California, Berkeley. For
each building, 16 different vantage points are selected to capture the
3-D appearance of the building. The imaging apparatus incorporates five
CITRIC camera sensors on a tripod, which can be triggered
simultaneously. Download the BMW database: http://www.eecs.berkeley.edu/~yang/software/CITRIC/BMW.zip Download the BMW SIFT feature set: http://www.eecs.berkeley.edu/~yang/software/CITRIC/BMW_SIFT.zip Download the BMW SURF feature set: http://www.eecs.berkeley.edu/~yang/software/CITRIC/BMW_SURF.zip Download the BMW CHoG feature set: http://www.eecs.berkeley.edu/~yang/software/CITRIC/BMW_CHOG.zip Contact: Allen Y. Yang If you use the BMW database in your publications, please properly cite our Fusion 2010 paper shown below. |
 Bowles Hall |
 California Hall |
 The Campanile |
 East Asia Library |
 Evans Hall |
 Foothill Residence |
 Garden |
 Haas School |
 Hearst Gym |
 Hearst Mining |
 Hertz Morrison |
 Hilgard Hall |
 Log Cabin |
 Main Library |
 Music Library |
 Parking Lot |
 Sather Gate |
 Sproul Hall |
 Valley Building |
 Wurster Building |
 |
Distributed Object Recognition in Band-Limited Camera Sensor NetworksWe study the classical problem of object recognition in low-power, low-bandwidth distributed camera networks. We propose an effective framework to perform distributed object recognition using a network of smart cameras and a computer as the base station. Due to the limited bandwidth between the cameras and the computer, the method utilizes the available computational power on the smart sensors to locally extract and compress SIFT-type image features to represent individual camera views. In particular, we show that between a network of cameras, high-dimensional SIFT histograms share a joint sparse pattern corresponding to a set of common features in 3-D. Such joint sparse patterns can be explicitly exploited to accurately encode the distributed signal via random projection, which is unsupervised and independent to the sensor modality. On the base station, we study multiple decoding schemes to simultaneously recover the multiple-view object features based on the distributed compressive sensing theory. The system has been implemented on the Berkeley CITRIC smart camera platform. The efficacy of the algorithm is validated through extensive simulation and experiments. |
- Nikhil Naikal, Allen Yang, Shankar Sastry. Informative feature selection for object recognition via Sparse PCA. International Conference on Computer Vision, 2011. [PDF] [Code]
- Nikhil
Naikal, Allen Yang, Shankar Sastry. Towards an
efficient distributed object recognition system in wireless smart
camera networks. International Conference on Information Fusion, 2010. [PDF]
- Allen Yang, Subhransu Maji, Mario Christoudas, Trevor Darrell, Jitendra Malik, and Shankar Sastry. Multiple-view object recognition in smart camera networks. Springer, 2010. [PDF]
- Allen Yang, Michael Gastpar, Ruzena Bajcsy, and Shankar Sastry. Distributed Sensor Perception via Sparse Representation. The Proceedings of the IEEE, 2010. [PDF]
- Allen Yang, Subhransu Maji, Kirak Hong, Posu Yan, and Shankar Sastry. Distributed compression and fusion of nonnegative sparse signals for multiple-view object recognition. Information Fusion, 2009. [PDF]
- Allen Yang, Subhransu Maji, Mario Christoudas, Trevor Darrell, Jitendra Malik, and Shankar Sastry. Multiple-view object recognition in band-limited distributed camera networks. ICDSC, 2009. [PDF]
- Counter-sniper Visual Surveillance. [download video demo]
- Recovery of Coverage Topology via Motion Tracking. [download video demo]
 |
 |
 |
 |
||
 |
 |
|
 |
||
 |
University of Modena and Reggio Emilia |
