


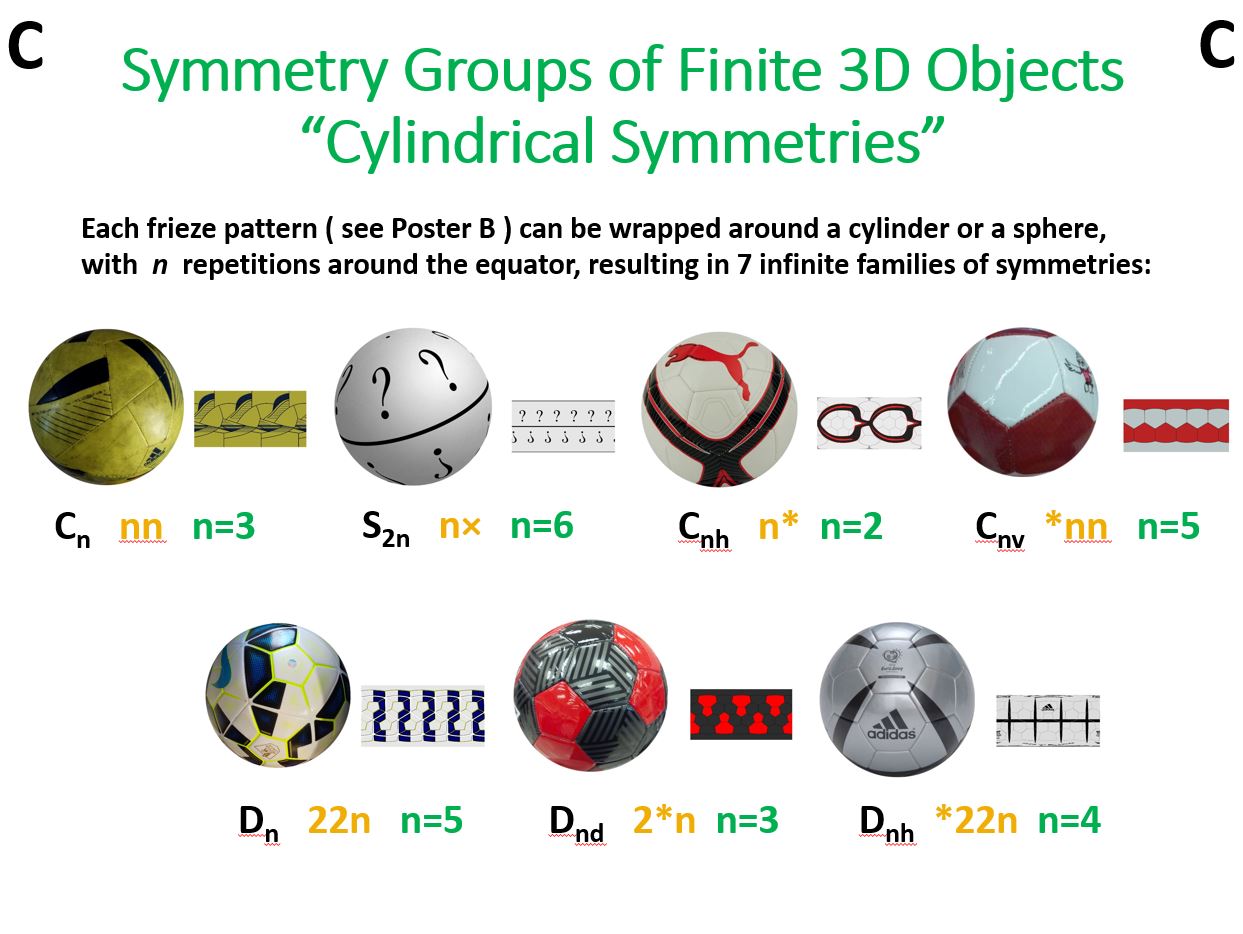
How to determine the symmetry group of an object:
Find a maximal-valence rotation axis, make it the z-axis,
go to chart 1,
look for C2 axes perpendicular to it, also for mirror
planes, ...
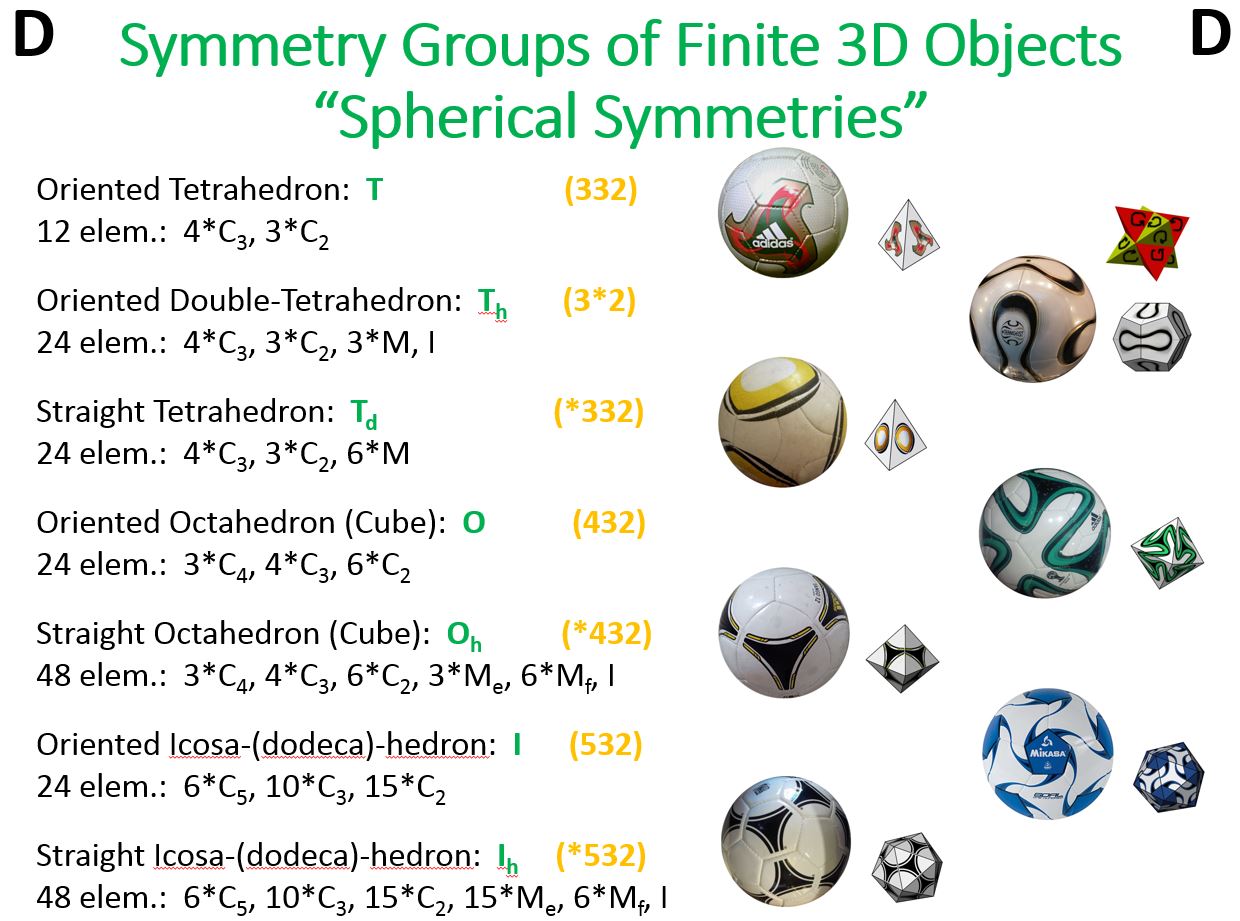
If you find more than one rotation axis with valence >= 3, go
to chart 2;
5-fold axes ==> icosa/dodeca;
4-fold axes at right angles ==> cube/octa, ...
the difficult one (for me) is the oriented double
tetrahedron; it has a mixture of pure rotation points and
kaleidoscope points;
the 3 mirror planes transform one
(right-handed) tetrahedron into the other (left-handed) one.
REVIEW: the required properties to make this a group:
Closure: A,B ==> AB, BA; --- All combinations
of operations are also elements of the group.
Associativity: (AB)C = A(BC); --- The order
in which elements are arranged may matter, but the
sequence in which they are combined does not.
Identity: IA = AI = A; --- The identity element makes
no change.
Inverse: A ==> A-1:
AA-1 = A-1A = I }; --- for every
element there is also an inverse element; an element may be
its own inverse.
==> Now let's apply this to some of the symmetry classes
we have encountered:
-- The simplest possible frieze with an asymmetrical
fundamental domain (repetitive element); translatory
symmetry only:
This is equivalent to the group formed by all
integer numbers! (e.g., right shift = "+1")
{infinitely many elements!} [DONE last time]
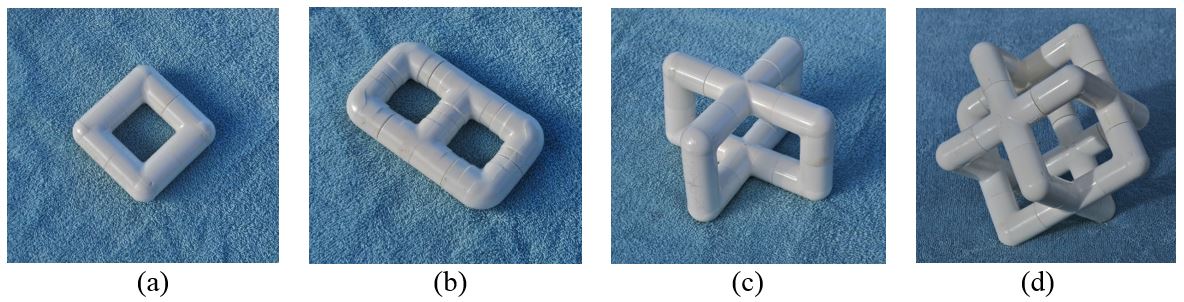
-- The 2D
square or {D4} hubcap -- under rotations and
mirroring: {8 elements};
-- The thick 3D square plate {D4h} -- under rotations
and mirroring: {16 elements};
-- Permutation of 4 books on a shelf -- while switching pairs of
books: {24 elements}; {mathematicians call this "S4"};
-- All symmetry operations on a tetrahedron:
{24 elements}; {when "oriented": only 12 elements};
-- The octahedron (==> see plexiglass model); == same
as a cube: {48 elements};
It has oriented icosidodecaheral
symmetry; no mirror planes.
Tetrahedron, cube (hexahedron), octahedron, dodecahedron,
icosahedron.
(Could you explain to a high-school student why there are
exactly (and only) five
Platonic Solids ?
Due: Feb. 25, 2019 (in two
weeks).
{kind=link}
{kind=link}
{kind=link}