Articulated Skeletons and Forward Kinematics
PREVIOUS
< - - - - > CS
184 HOME < - - - - > CURRENT
< - - - - > NEXT
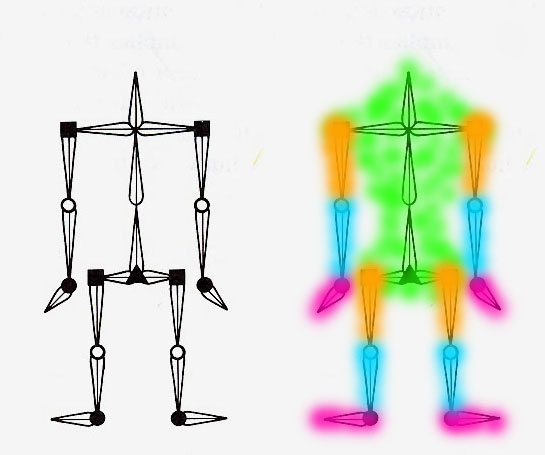
If there are multiple rigid objects ("links") connected
with such joints, we call this a "linkage" or an
"articulated skeleton".
In computer graphics, a skeleton is often dressed up with more complex geometry, perhaps muscles or skin . . .
(this may be deformable geometry).
For now we only consider linkages that are topologically equivalent of a tree:
One node is designated as the "root node" -- often the
biggest, heaviest, most central link (Example: torso in a humanoid).
The direction towards the root is called "inboard." In tree structures links have one inboard joint.
The direction away from the root is called "outboard." In tree structures links may have multiple outboard joints.
Links can be complicated and twisted -- but in computer graphics this is typically NOT the case!
Linkages in the form of a graph with closed loops play an important role in mechanical engineering.
We ignore them in CS 184 (but you may hear more about them in CS 285).
Every articulated skeleton is then described with an appropriate scene hierarchy (= tree).
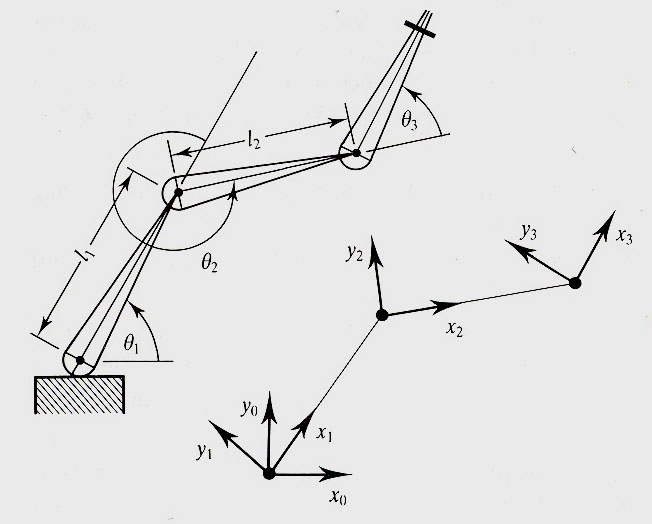
If the parameter values for all the joints are specified (= state
vector), the geometry of the structure is completely determined.
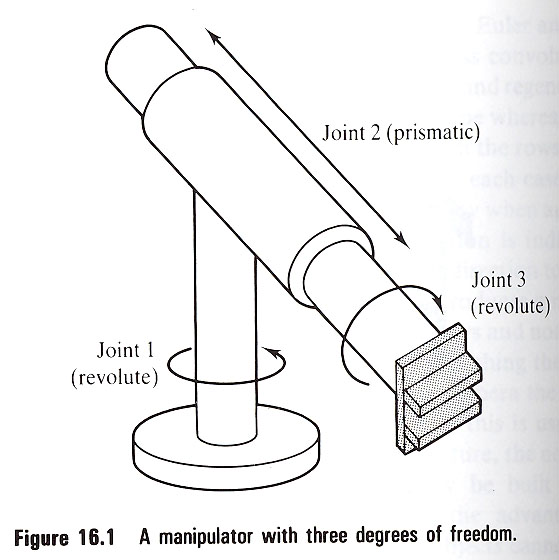
Every joint needs as many parameters as there are DoFs,
as well as the corresponding transformation matrices to manipulate that joint.
If one or more of the parameter values are changed, one can readily recalculate the geometry of the structure,
and, in particular, the position of the end effector.
(You know how to do this from AS#3).
==> This is "Forward Kinematics"
(figuring out the overall geometry and the locations of all end-effectors).
There is not much to it, except a few new fancy names!
You can also specify for all the paramters how they may change as a function of time
(as explicit functions, or as graphical diagrams) -- and thus choreograph a complex skeleton.
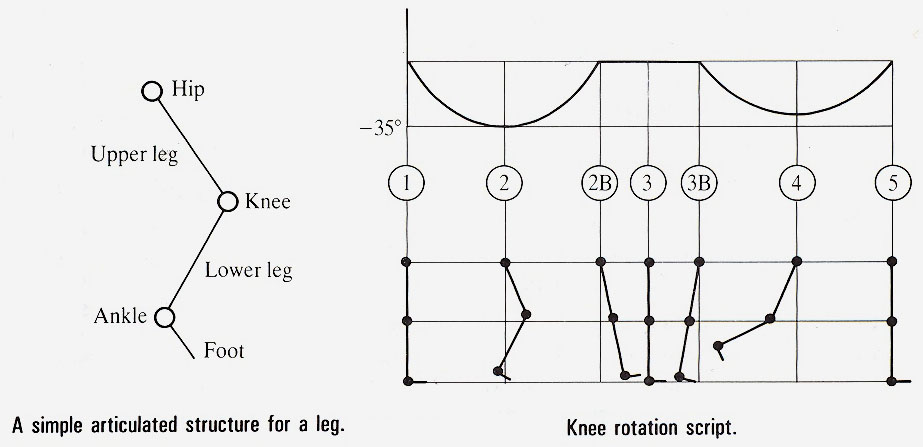
-- Above is a graphical depiction of the knee bending angle as a function of time for the keyframes shown below it.
PREVIOUS
< - - - - > CS
184 HOME < - - - - > CURRENT
< - - - - > NEXT