Kinematics: Joints
PREVIOUS
< - - - - > CS
184 HOME < - - - - > CURRENT
< - - - - > NEXT
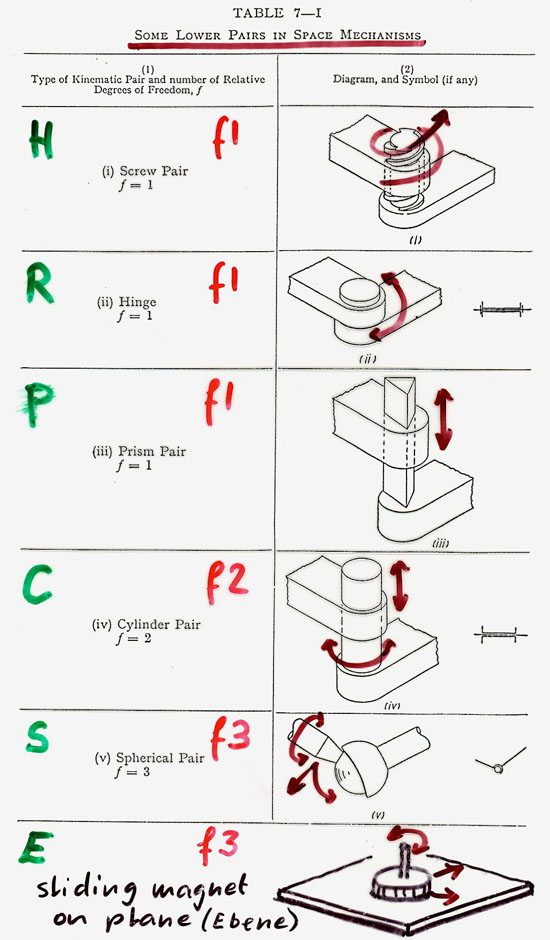
In 3D space two objects have 6 DoF (3 position coordinates, 3 angles) with respect to one another.
If they are (mechanically) connected, so that there are fewer DoFs -- then this is called a "joint."
There are 6 types of "lower (order) mechanical joints":
H (helical), R (rotational), P
(prismatic), C (cylindrical), S
(spherical), E (Ebene = plane).
There are also more complex, higher (order) joints -- but we ignore those in CS 184 (You may see them in CS 285).
PREVIOUS
< - - - - > CS
184 HOME < - - - - > CURRENT
< - - - - > NEXT