John Canny's Home Page
Professor
529 Soda Hall
Tel: (510)642-9955
Fax: (510)642-5615
jfc@cs.berkeley.edu
Teaching:
CS160: User interface design,
prototyping and evaluation
Courses from previous semesters
Current Research:
 |
HCC is a research consortium on
Human-Centered Computing. It comprises faculty from computer science, sociology,
psychology, SIMS, education, business, linguistics, electrical and mechanical engineering.
HCC's goal is to design information systems into human contexts, and to better understand
those contexts using computational tools. |
 |
PRoPs:
A PRoP is a Personal, Roving Presence. Think of a physical (robot) avatar. The research
challenge in social tele-robotics is understanding the physical cues exchanged by embodied
actors during face-to-face communication. Our goals are better online communication,
persuasion and trust-building in that order. The photo shows PRoP designer Eric Paulos and two remotely-embodied
friends. |
|
Flexonics: Flexonics could be called macroscopic MEMS,
or polymer mechatronics. Our goal is to design fully-functional appliances and
human-interfaces from organic materials, and to build them without assembly using 3D
printing techniques. Jeremy Risner is developing a vocabulary of passive and active
mechanical components. We are working with Prof Vivek Subramanian in EE, who is designing
the electronics. |
|
The Soda Hall Smart room (411 Soda). Tom Duan and others are building an
intelligent, sensor-equipped space for meetings and design brainstorming. It will house a
next-generation UPM table. |
|
Transparent control of gesturing avatars: Work by Francesca Barrientos. |
Recent Projects
 |
UPM:
A universal planar manipulator. It turns out that planar vibration of a rigid plate is
enough to independently move many objects on the plate in any direction. Here's the gadget
that does it. Principal architect is Dan
Reznik, who graduated in 2000 and moved to Siemens TTB in Berkeley. |
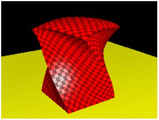 |
Real-time FEM modeling with
global deformation. This is a full non-linear FEM system that can simulate soft models
with 1000s of nodes in real-time. The system was designed for surgical and creature
simulation where deformations exceed the linear range. Includes collision response for
sliding contacts. Work of Yan Zhuang,
who graduated in May 2000 and moved to Qualcomm. |
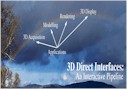 |
3DDI is a project on 3D
vizualization and direct manipulation of virtual objects. It is a Multidisciplinary
University Research Initiative (MURI) project supported by BMDO and ONR. 3DDI involves 7
faculty from Berkeley, 2 from MIT, and 1 from UCSF. I work on modeling of deformable
objects, on real-time laser depth scanning and the volumetric LCD displays. At quiet times
I also direct the project. |
 |
IMPULSE is an impulse-based
rigid body simulator. Impulse was developed by Brian Mirtich and extended by Francesca Barrientos to support
control/behavior scripts in Java. |
Authority in information management and referral systems. Work by Heyning Cheng. Here is his MS report.
APU: APU
is a set of Algebra Programming Utilities, developed by Ashu Rege. Target applications are
computational geometry (especially non-linear geometry) and geometric modeling. Its
available for free download.
Ioannis Emiris maintains a repository of geometry
algorithms including his Berkeley implementations of any-dimensional convex hull, and
efficient mixed volume. He also has code for sparse
polynomial systems solving based on our sparse resultant work.
Publications:
Conferences and Workshops:
I was co-organizer of a workshop on future applications of robotics
in January '99 in Toulouse France. The "Personal Robotics" web site is here. I ran two related workshops at the IEEE
Robotics Conferences in 99 and 2000.
I was program co-chair for the applied track of the ACM Symposium on Computational Geometry
(SCOG99).
Non-research:
Academic Freedom: I served for 5 years on UC
Academic Freedom committees. Two years on the Berkeley committee, two years as chair of
that committee, and one year as chair of the UC system-wide AF committee.
I served on the recent UC Copyright Task Force.
Here is the committee report.
Former Ph.D. Students
- Paul Jacobs (Qualcomm)
- Greg Heinzinger (Qualcomm)
- Dinesh Manocha (UNC)
- Ming Lin (UNC)
- Ioannis Emiris (INRIA)
- Aaron
Wallack (Cognex)
- Brian Mirtich (MERL)
- Ashu Rege (Paraform Inc)
Last updated 6/24/01