|
|
|
Our parallel manipulation algorithm requires that parts' positions be known at all times. This is addressed by having a camera overlook the plate and feed an NTSC signal back to the host PC. The camera setup is shown below:
A typical input frame is shown below. We use black-painted "pennies" for parts.
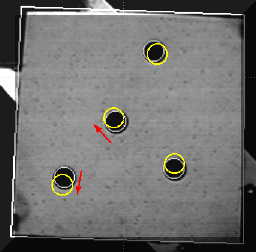
A sequence of filtering, edge detection, and Hough transform operations is performed which yields the location of the table's edges. Then the image is convolved with a disk-like mask to locate the coins' centers. This operation is done once-and for all prior to an experiment, resulting in a reliable map of the experiment's features, as shown below:
During the experiment per se, coins will move very little from frame to frame, so recalculating the coins' new locations can be done efficiently by local convolution-based search, as shown below:
|
| © 2000 Dan S. Reznik, <dreznik@cs.berkeley.edu> |