

Research Projects
Volitional control of neural ensemble activity
 The BMI paradigm is a powerful tool that
allows investigating
sensorimotor learning and control with both natural and prosthetic
limbs. At the heart of this paradigm lies the volitional control of neural activity.
The BMI paradigm is a powerful tool that
allows investigating
sensorimotor learning and control with both natural and prosthetic
limbs. At the heart of this paradigm lies the volitional control of neural activity.Model-based decoding of arm dynamics from neural ensembles
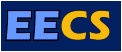
This project aims to develop a BMI
architecture for real world tasks that require versatile manipulation
and interaction with the environment. We propose controlling the
mechanical impedance of the prosthetic device by volitionally
modulating neural activity that is input to a musculoskeletal model of
the
arm, from which kinematic and stiffness variables can be derived.
Delivery of sensory feedback via intracortical microstimulation
if a subject can perceive and interpret ICMS as a
guiding stimulus for generating more
accurate motor signals to control a prosthetic device.
Technology development
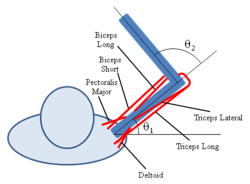
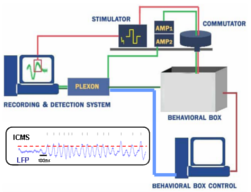
 At
the lab we develop custom-made hardware for BMI experiments. Current
developments include 1) a system for closed loop microstimulation that
allows simultaneous recording and ICMS triggered by neural and/or
behavioral events; and 2) using small inertial sensors to monitor
behavior in subjects under different experimental conditions and for
long periods of time.
At
the lab we develop custom-made hardware for BMI experiments. Current
developments include 1) a system for closed loop microstimulation that
allows simultaneous recording and ICMS triggered by neural and/or
behavioral events; and 2) using small inertial sensors to monitor
behavior in subjects under different experimental conditions and for
long periods of time.