Application of Inverse Kinematics
PREVIOUS
< - - - - > CS
184 HOME < - - - - > CURRENT
< - - - - > NEXT
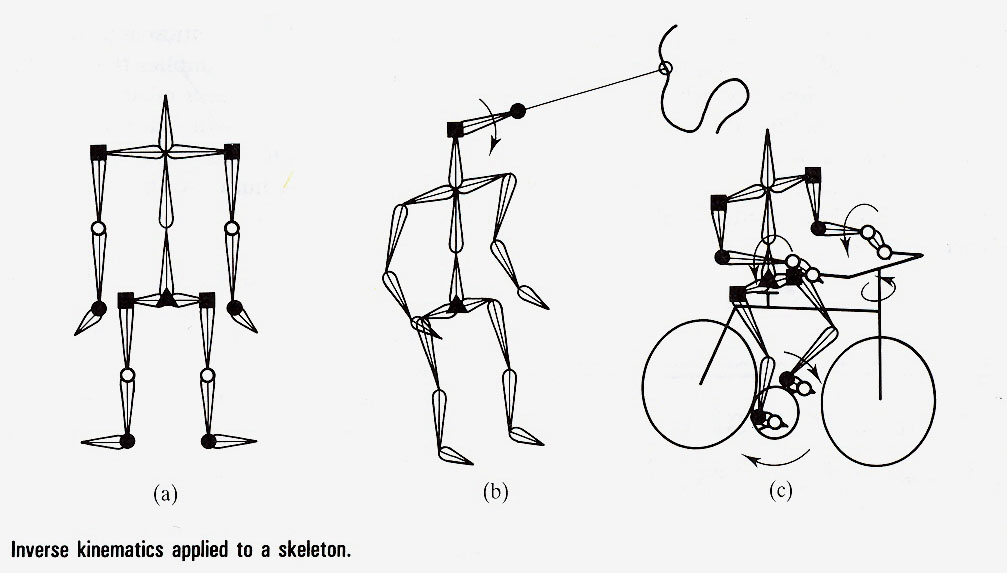
(a) skeleton of a head-less monster;
(b) added an additional link for the head, which is made to follow in its direction the movements of a bee;
(c) skeleton on a bicycle; inverse kinematics is used to keep the feet on the pedals and the hands on the handle bars.
There are many more issues:
How to make the "most natural looking" animation of a skeleton moving from one state to another one.
Inverse kinematics in the presence of constraints (e.g. limitations on joint angles; keeping center of gravity above feet).
How to maintain stability at all times (step-size control).
Interpolation for smooth animation (especially in the presence of constraints).
To learn more:
(This is material that you should look at if you choose I.K. as your project extension,
but it will not be on the Final Exam.)
A. Watt and M. Watt: Advanced Animation and Rendering Techniques -- Chapter 16.
PREVIOUS
< - - - - > CS
184 HOME < - - - - > CURRENT
< - - - - > NEXT