
Level I
|
|
Level I |
|
© Copyright
Notice: It is important that you
read and understand the copyright of the following software packages as
specified in the individual items. The copyright varies with each
package due to its contributor(s). The packages should NOT be used for
any commercial purposes without direct consent of their author(s).
This project is partially supported by NSF TRUST Center at UC Berkeley, ARO MURI W911NF-06-1-0076, Startup Funds from University of Texas at Dallas, Tampere University of Technology, and Telecom Italia Laboratory.
| Body Sensor Layer |
|
 |
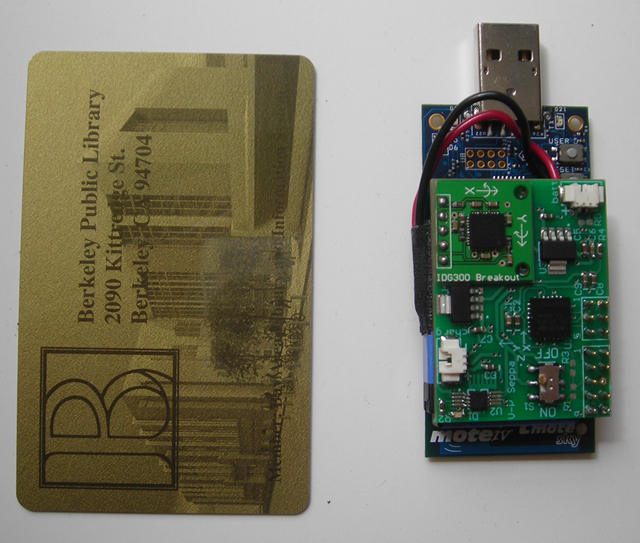
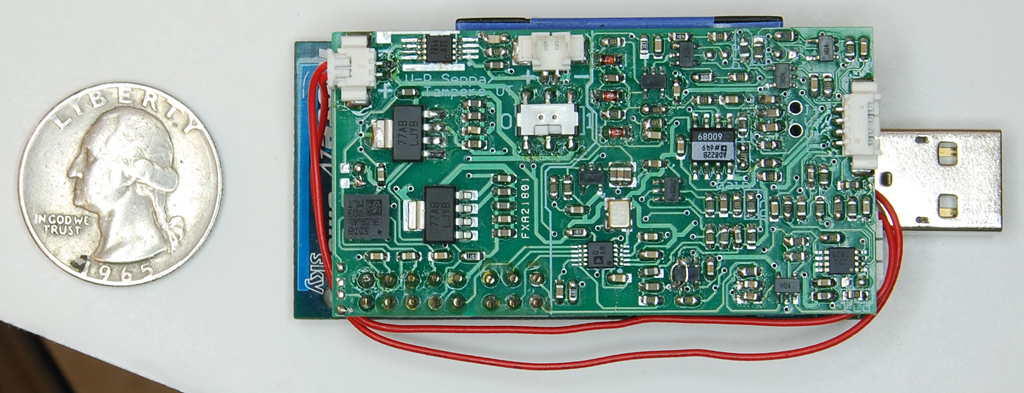
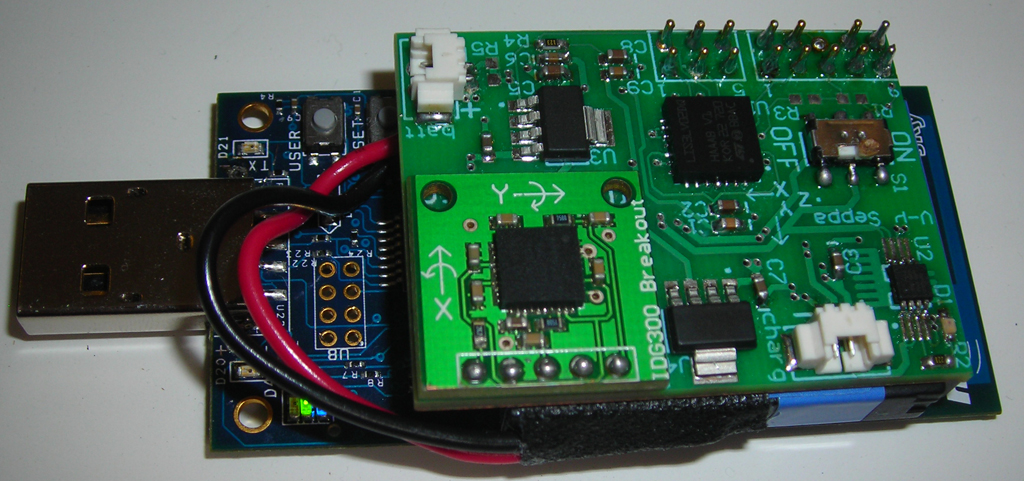 Each custom-built motion sensor has a triaxial accelerometer and a biaxial gyroscope, which is attached to a Tmote Sky network mote. Each node is currently powered by a Li-ion battery housed between the two sensor boards. The current hardware design of the sensor contributes certain amounts of measurement error. The accelerometers typically require some calibration in the form of a linear correction, as sensor output under 1g may be shifted up to 15% in some sensors. It is also worth noting that the gyroscopes produce an indication of rotation under straight line motions. Fortunately these systematic errors appear to be consistent across experiments for a given sensor board. However, without calibration to correct them, the errors may affect the action recognition if different sets of sensors are used interchangeably in the experiment. |
|
 The Wisepla biosensor board
was developed in Tampere University of Technology, Finland, which is
also attached to a Tmote board. The sensor node integrates three types
of sensors:
[A demonstration video of the biosensor is available] |
|
Distributed Action Recognition via Motion
Sensors |
| This technique is patent
pending by the UC Berkeley IP offices. For licensing,
please contact: [Office of Intellectual Property & Industry Research Alliances] Author: Allen Yang (c) UC Berkeley, 2008. |