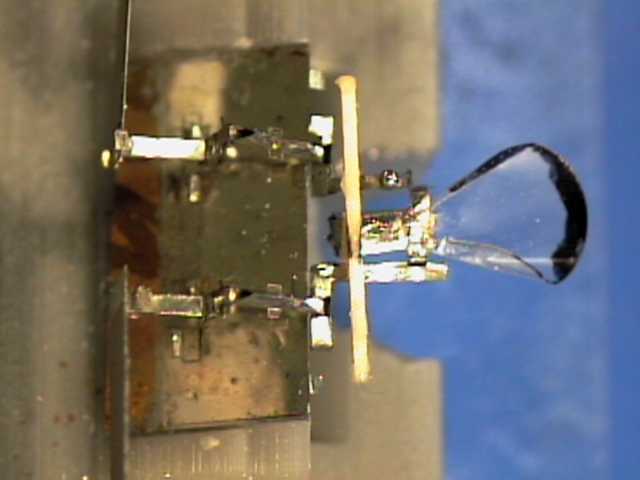
00k-Thorax: 2 DOF
completed Dec.2000, repaired March 2001

Description
This design was the second attempt at creating a high speed flapping/rotating
thorax with a rigid wing at
1.3X final scale. (The previous version used Thunder unimorph actuators
and had quite small displacement.)
Initial operation with no wing showed widely separated flapping and
rotational modes, with flapping at
about 100 Hz (?) and rotation at about 170 Hz (?) but at small amplitude.
Adding the wing lowered the
flapping resonant frequency to about 70 Hz or so. Only by adding significant
rotational inertia was it
possible to decouple the flapping and rotational modes. Coupling through
the differential stiffness due
to the 12 um polyester was a significant problem. Large amplitude motion
was limited by the
wooden inertia bar hitting the 4 bars.
-
First successful uncoupled flapping and rotation, but only at 40 Hz.
1) Date of fabrication
Dec. 2000
2) Dimensions of structure?
-
12um polyester flexures, slider crank attachment=1.0mm,
-
4 bar dimensions: 6,6,6,0.5, T=.012 rad/um
-
4 bar spacing: 8.5mm, 5 mm differential length, lambda=1
-
10 mm wing attached at 5 mm from delta joint
-
(no base cross flexures)
3) Actuation parameters
two 16x3 PZT
4) Resonant Frequency
-
flap 40Hz, rotation 27Hz
-
added bar, ballbearing, box to increase rotational inertia
-
J_flap = 200mg-mm^2, J_rotation = 110 mg-mm^2
5) Amplitude of motion
Q >6, DC motion ~ 0.2 degrees/volt?
(both actuators driven)
6) Tests performed, duration of testing and mode of failure (if applicable)
-
one actuator failed during operation-possible
depolarization due to cable problem.
-
slider crank detachment from baselink,
delta joint needed surgery as well.
7) Any other relevant info that you think would be useful
-
Left spar actuator motion dropped
to only 75um, so actuator was replaced with 16x6 PZT in March 2001.
-
Better flap/rotation matching
before 16x3 was replaced?
8) Status (Aug. 2001)
functioning but large motion
limited by inertia bar.