| PREVIOUS NEWS |
|
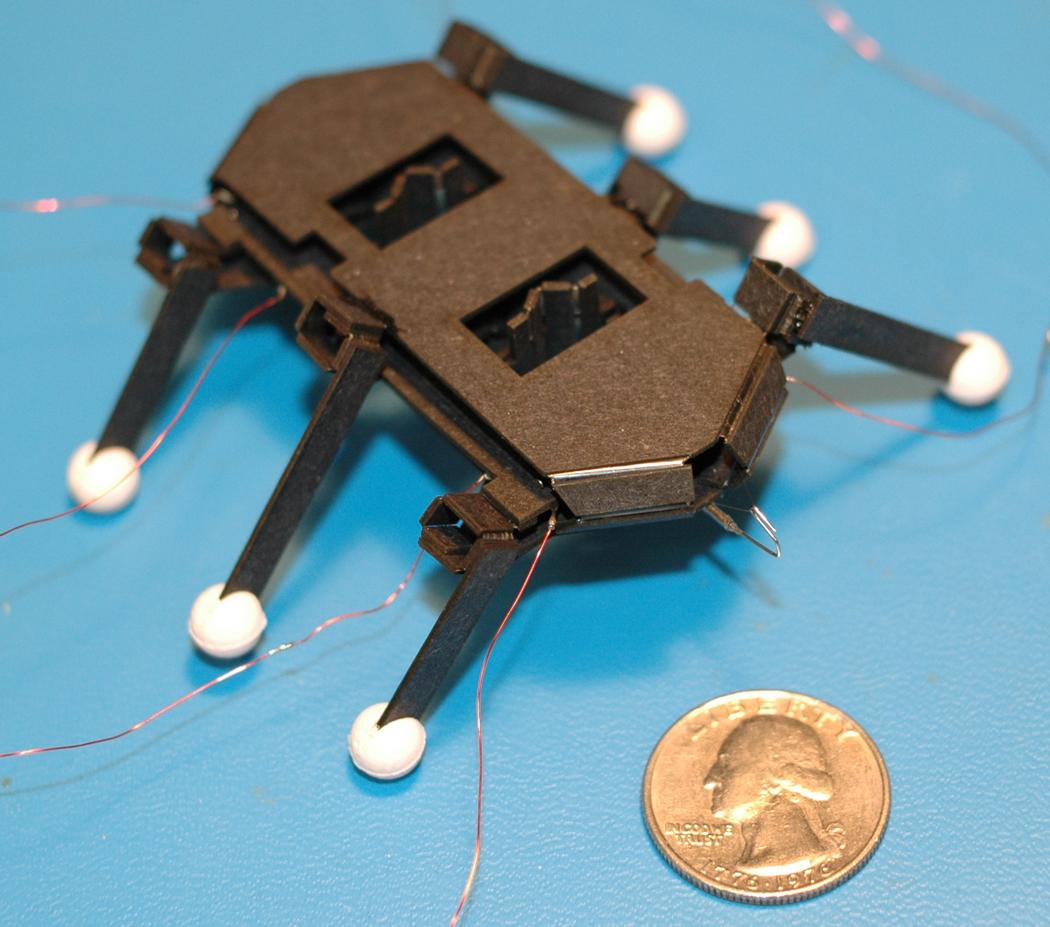
| Force Sensing Shell
using a Planar Sensor
(Oct. 2015) We created a low-cost, light-weight force-torque sensor using photointerrupters with force sensivity of 17 mN. This sensor can be used for body contact location as well as environment drag forces. J. Goldberg and R. Fearing, (IEEE IROS 2015) and video. |
|
| Terradynamically
streamlined shapes in animals and robots enhance
traversability (June 2015) We found that both cockroaches and simple robots rely on shell shape to roll the body to allow traversal through a field of compliant stalks. Chen Li, et al. Bioinspiration and Biomimetics and video |
 |
|
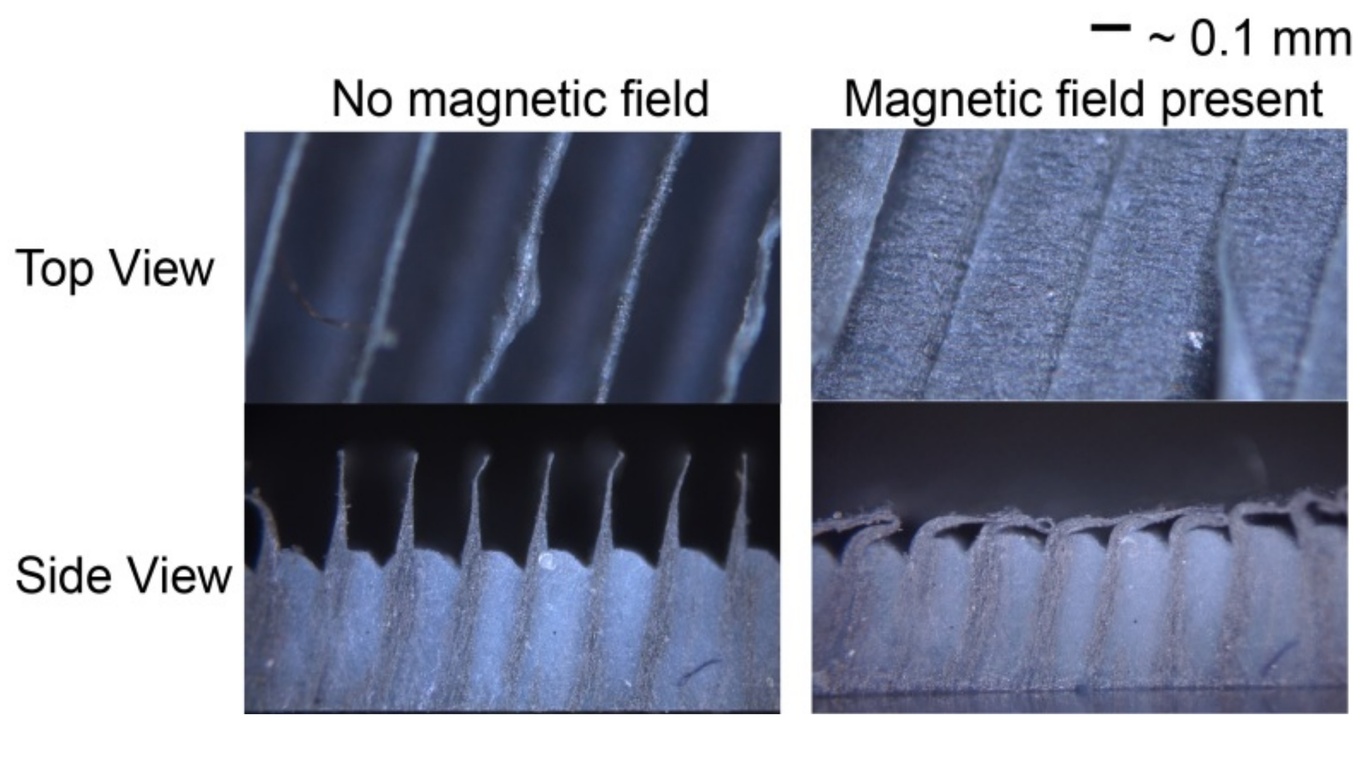
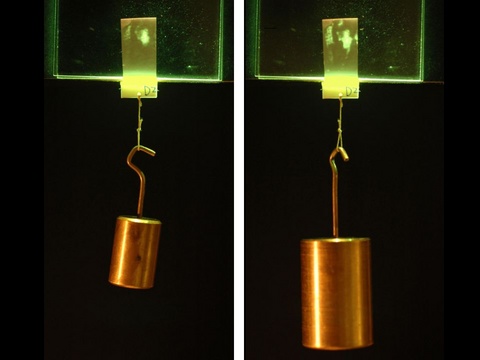
Controllable Particle Adhesion (Feb. 2013) Controllable adhesion to glass spheres with a magnetically actuated synthetic gecko adhesive is demonstrated. Results show sphere pull-off forces can be increased 10-fold by changing the ridge orientation via the external magnetic field, and that the effective elastic modulus can be changed from 65 kPa to 1.5 MPa. movie of controllable adhesive Gillies et al. Advanced Functional Materials, 2013 |
 |
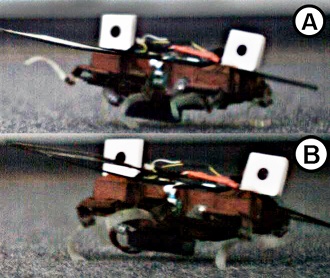
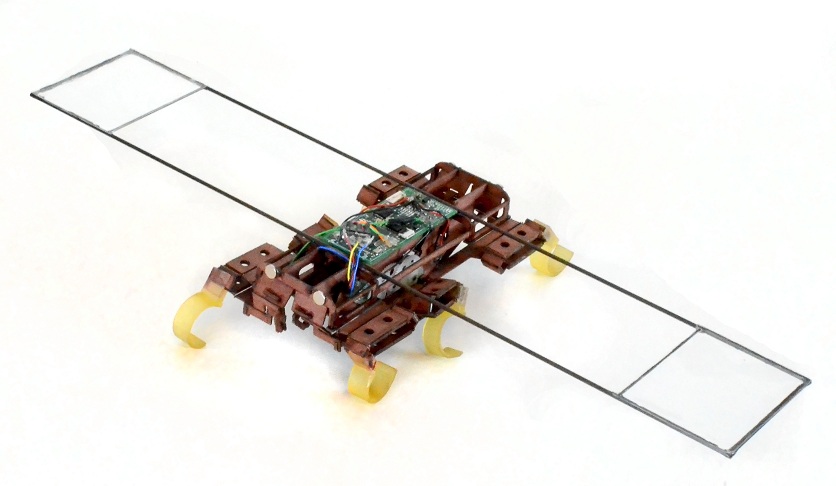
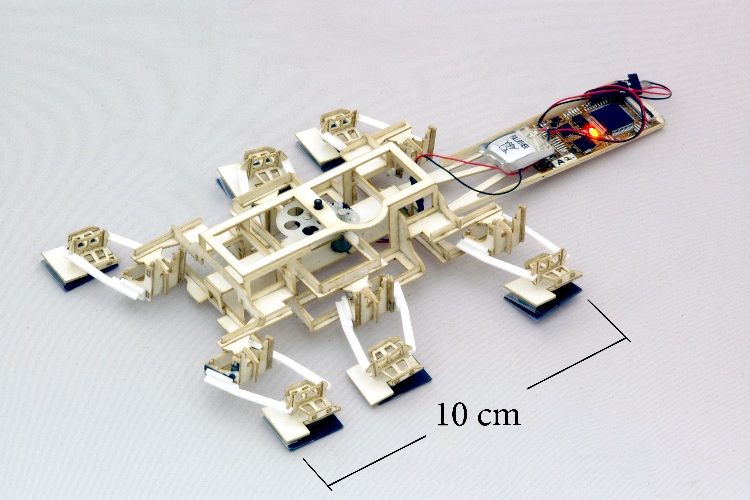
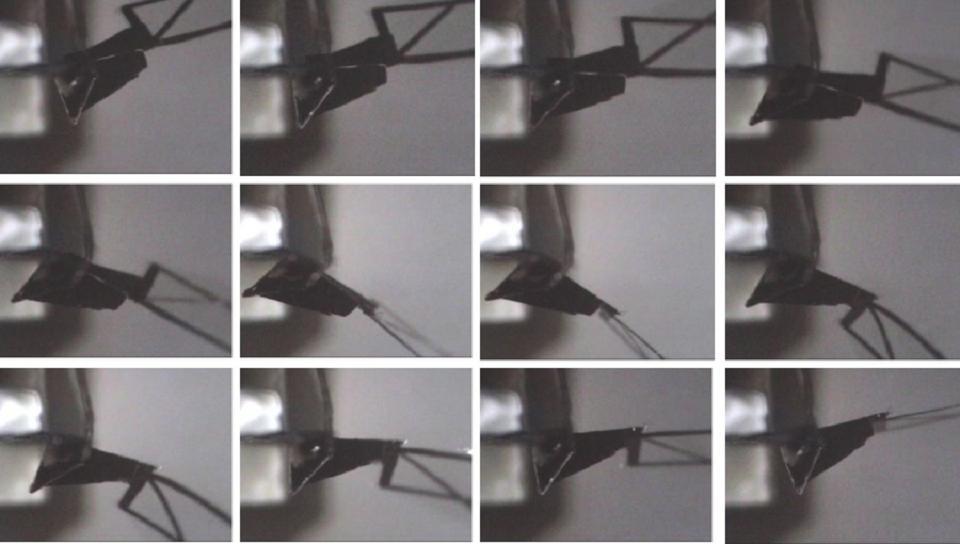
| Coordinated
Launching of an Ornithopter with a Hexapedal Robot
(May 2015) We develop a cooperative launching system for a 13.2 gram ornithopter micro-aerial vehicle (MAV), the H2Bird, by carrying it on the VelociRoACH. We determine the necessary initial velocity and pitch angle for take off using force data collected in a wind tunnel and use the VelociRoACH to reach these initial conditions for successful launch. Rose et al. (IEEE ICRA May 2015) video |
 |
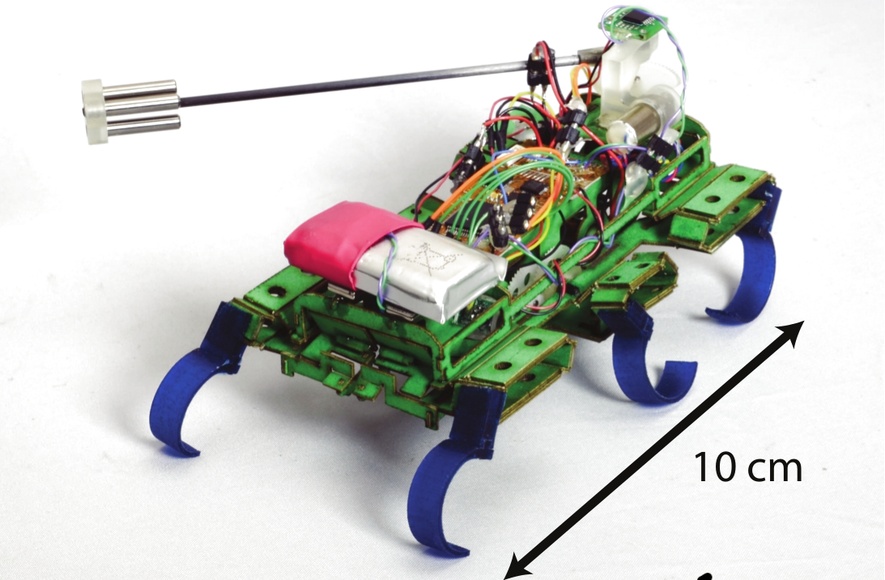
| Running beyond the
bio-inspired regime
(May 2015) The X2-VelociRoACH is a 54 gram experimental legged robot which was developed to test hypotheses about running with unnaturally high stride frequencies. It is capable of running at stride frequencies up to 45 Hz, and velocities up to 4.9 m/s, making it the fastest legged robot relative to size. Haldane and Fearing ( IEEE ICRA May 2015) video |
 |
|
Anisotropic Leg Spines for Increased Traction
(May 2015)
Collapsible leg spines found on insects and spiders provide a passive mechanism for increased traction while running over complex terrain. Spiny feet for VelociRoACH reduced dimensionless Cost of Pulling by an order of magnitude while robot speed while pulling load increased by 50%. Lee and Fearing (IEEE ICRA May 2015) video |

|
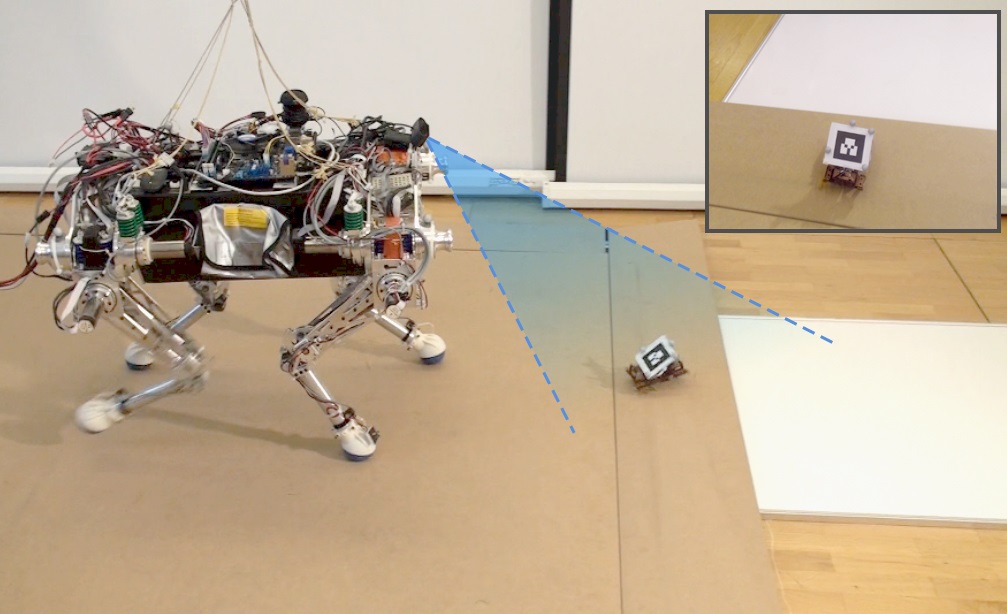
| Detection of
Slippery Terrain with Picket Robot
(June 2014) Experiments conducted with StarlETH (ASL, ETH Zurich) and UCB VelociRoACH using joint localization detected slippery terrain with 92% accuracy. Haldane et al. ( IEEE ICRA June 2014) video |
|
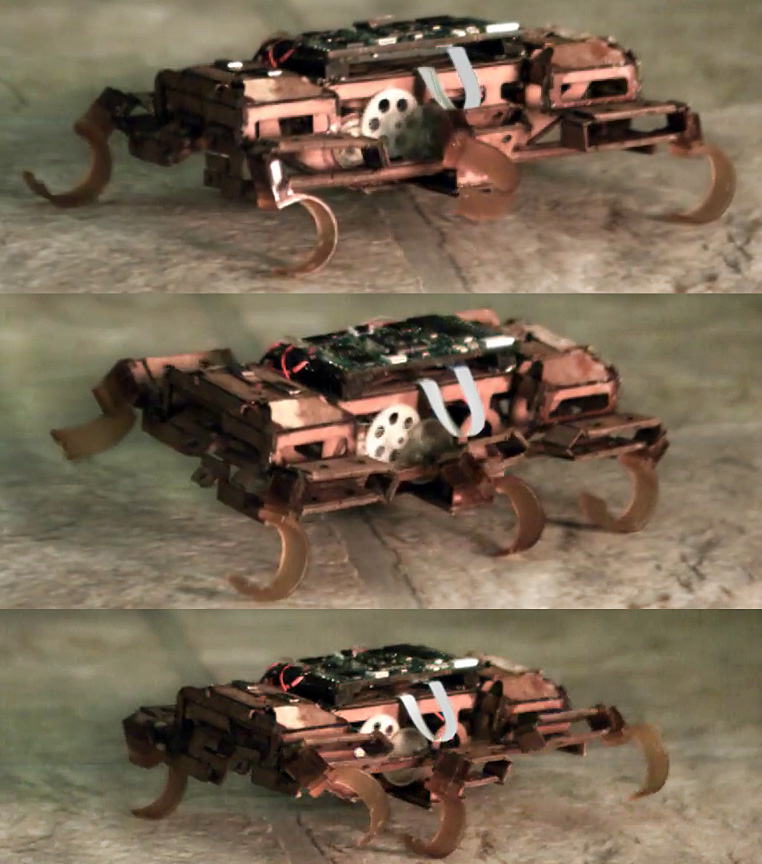
| Roll oscillation
modulated turning
(June 2014) A new dynamic turning mode in legged robots is demonstrated, which uses a phase-locked gait to excite coupled height and roll oscillations. A modified robot with enhanced roll oscillations turned at 206 deg/sec at a speed of 0.4 m/s. Haldane and Fearing (IEEE ICRA June 2014) video |
 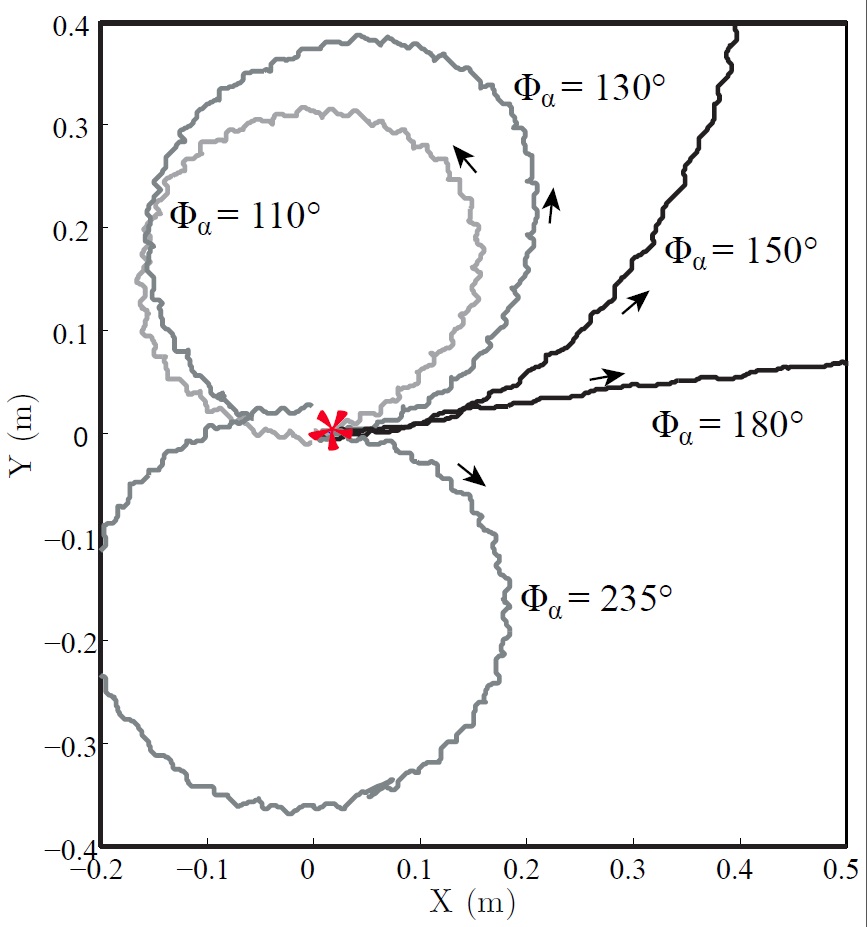 |
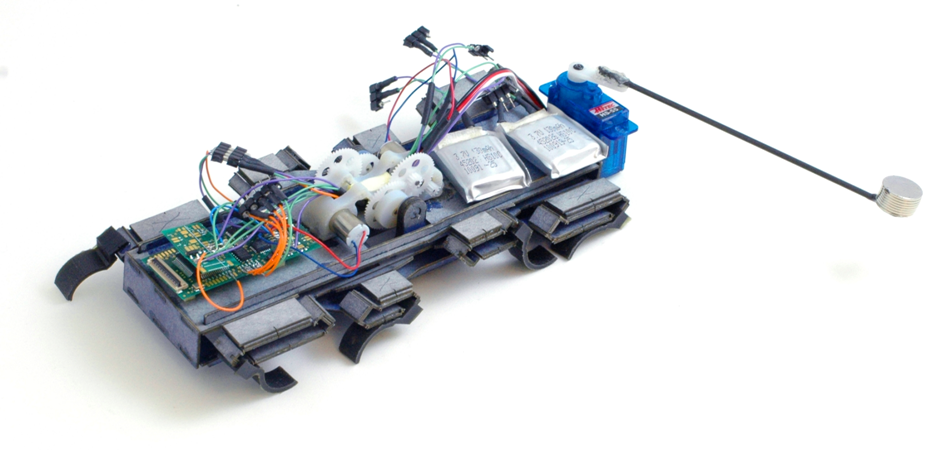
| Aerodynamic Steering
SailRoACH (Oct. 2013) SailRoACH uses aerodynamic forces on its tail to turn, achieving at 1.2 meter radius turn while running at 1.6 meters per second. Scaling laws work favorably for this turning mode for fast running small robots. Kohut et al. (IEEE IROS Nov. 2013) movie |
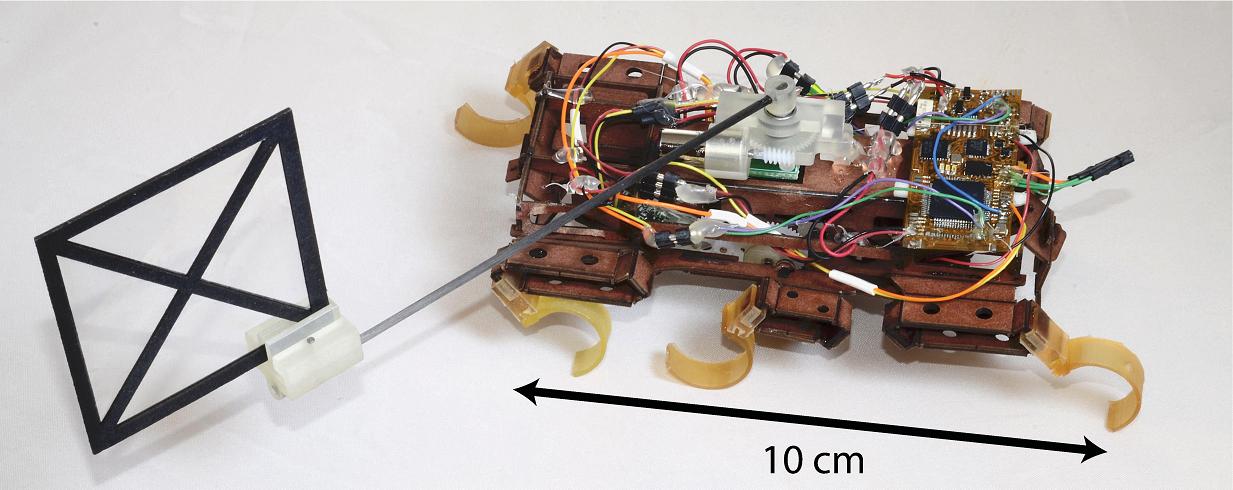 |
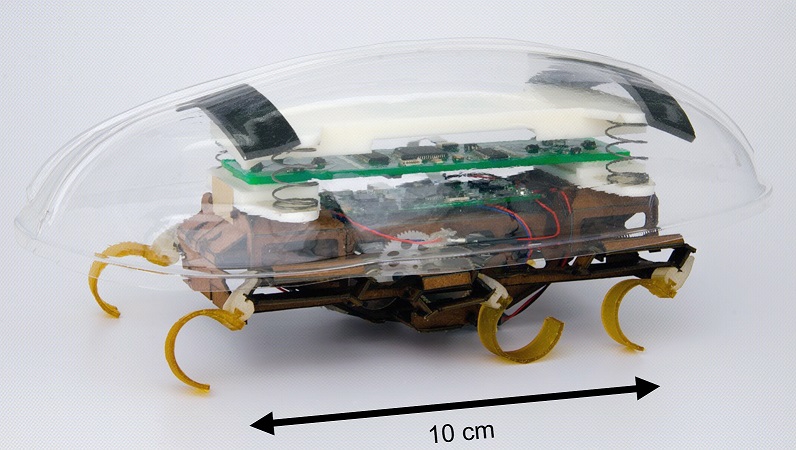
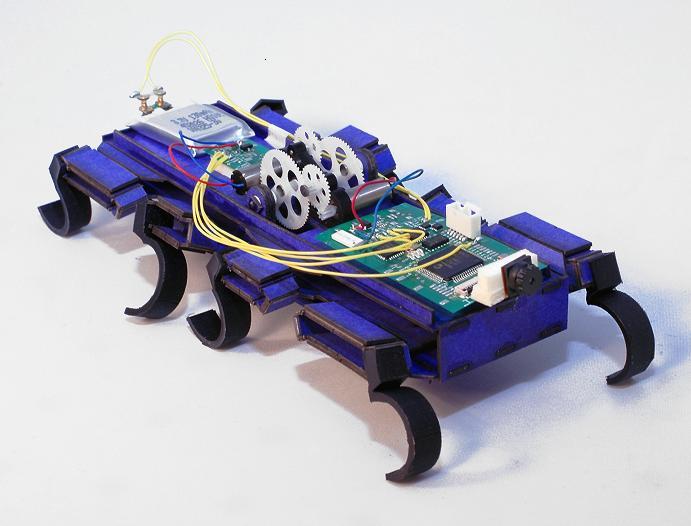
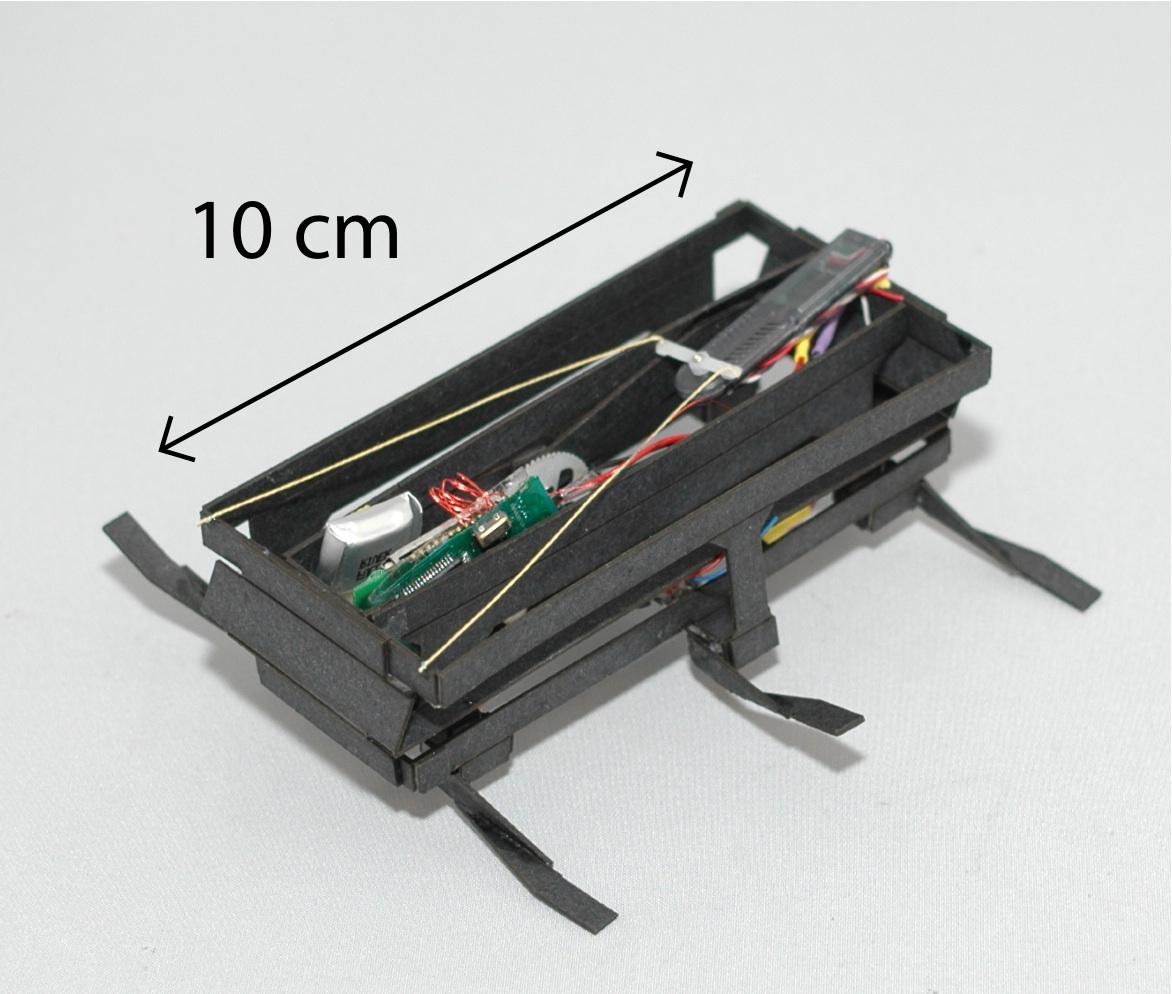
| Animal-inspired Design and
Aerodynamic Stabilization of a Hexapedal
Millirobot (Jan. 2013) The VelociRoACH is a 10 cm long, 30 gram hexapedal millirobot capable of running at 2.7 m/s, making it the fastest legged robot built to date, relative to scale. Dynamic similarity technique combined with aerodynamic damping provides stability at high speeds. D. Haldane et al. IEEE ICRA May 2013. paper Movie |
 |
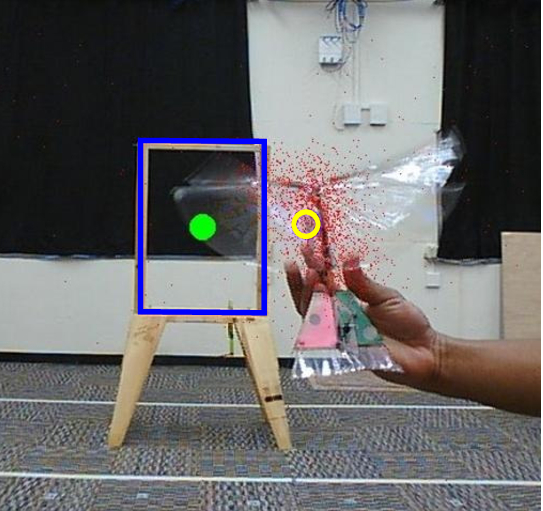
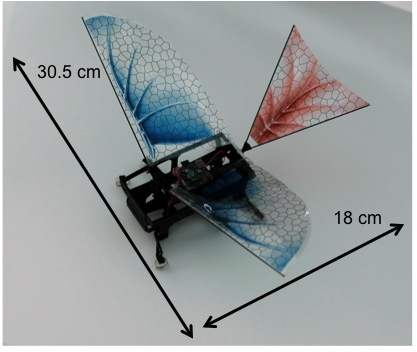
| Cooperative
Control
for Window Traversal with an Ornithopter MAV
(Mar. 2013) We demonstrate cooperative target-seeking between a 13 gram ornithopter (H2Bird), and a lightweight ground station. The ground station provides heading estimates to the ornithopter using a real-time motion tracking algorithm. Julian et al. Autonomous Agents and Multiagent Systems (AAMAS2013). link movie1 movie2 |
  |
|
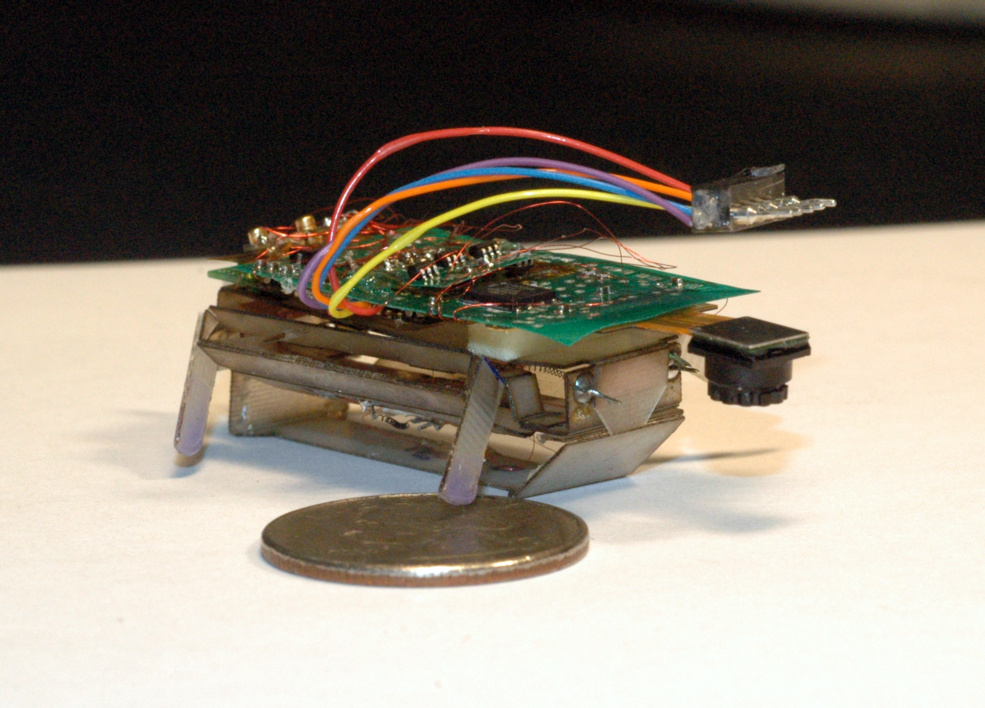
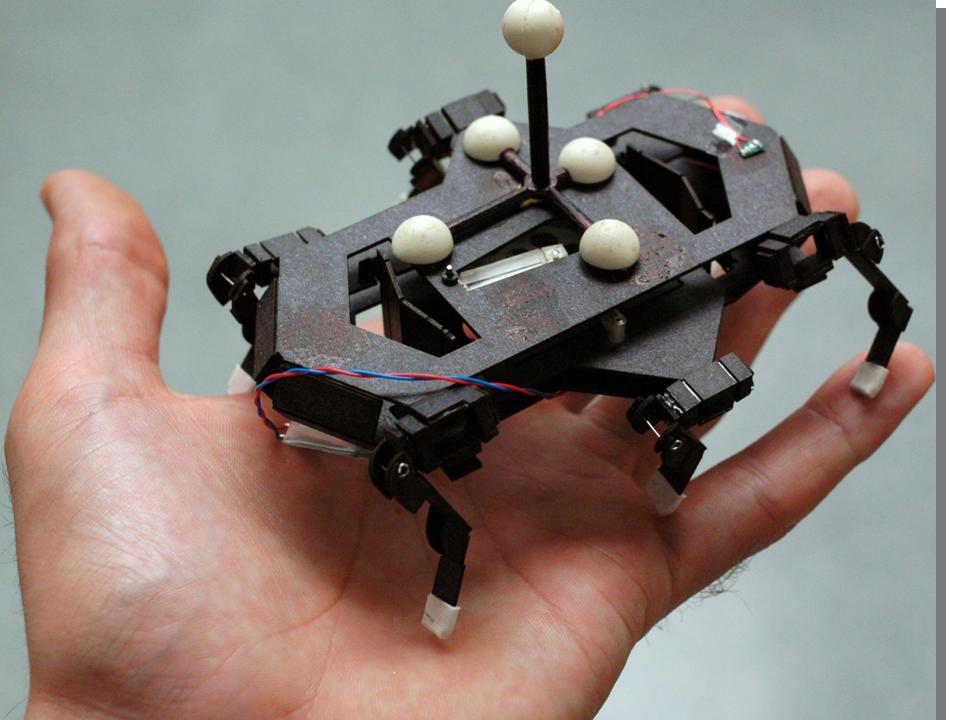
A Sprawl Tuned Autonomous Robot (Feb. 2013) This robot has a variable leg sprawl angle in the transverse plane to adapt its stiffness, height, and leg-to-surface contact angle. Contact angle and normal contact forces are substantially reduced when the sprawl angle is low, and the velocity increases over smooth surfaces, with stable running at all velocities up to 5.2 m/s. Zarrouk et al. ICRA 2013. Movie |
 |
| Dynamic Climbing of
Smooth Surfaces (Oct. 2012) Dynamic climbing of near-vertical surfaces introduces reaction forces which require greater normal adhesion to prevent falling. Dynamic climbing on a 30 degree slope succeeds at 12 Hz leg rate, but only 4 Hz on a 70 degree slope. Birkmeyer, Gillies, Fearing IROS Oct 2012 |
 |
| 6
legged TAYLRoACH (July 2012) The 100-mm scale Hexapedal robot TAYLRoACH can rapidly maneuver with 90 degrees turns while running. Kohut et al. CLAWAR July 2012. Tail Maneuvers movie |
 |
| OctoRoACH
with Tail (May 2012) The 100-mm scale OctoRoACH robot can turn using differential drive at 100 degrees per second, or with a dynamic tail with peak turn rates of 400 degrees per second. Pullin et al. ICRA 2012 |
 |
| BOLT:
Bipedal
Ornithopter for Locomotion Transitioning (Sept. 2011) Bolt is a 13 gram ornithopter with legs for mixed-mode locomotion. In running modes, wings provide passive stability. With wing assisted running, BOLT can run at 2.5 m/sec while maintaining ground contact. IROS 2011 . movie |
 |
| DASH+Wings:
Wing Assisted Running (Oct. 2011) DASH+Wings is a small hexapedal winged robot that uses flapping wings to increase its ground locomotion capabilities. The wings increase climbing slopes and stability, but do not provide enough thrust for flight. A wing assisted running robot and implications for avian flight evolution. Bioinspiration and Bioimetics |
 |
|
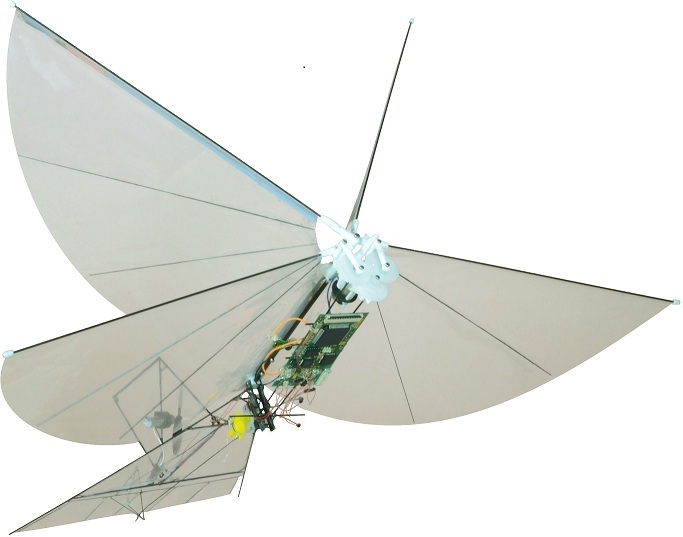
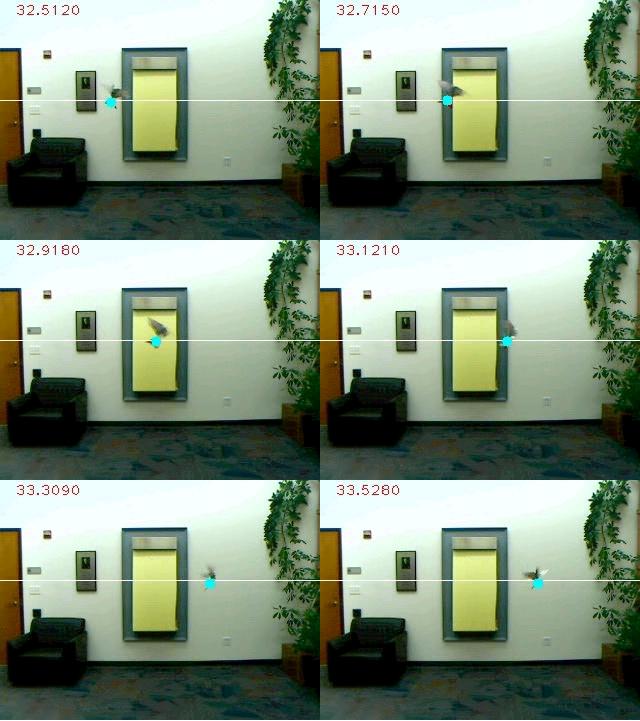
Flight Control for Target Seeking by 13 gram
Ornithopter (Sept.
2011)
We demonstrate autonomous flight control of 13 gram ornithopter capable of flying toward a target without any remote assistance. For this demonstration, we have developed a closed-loop attitude regulator for the ornithopter using onboard sensing and computational resources. Movie IROS 2011 . |
 |
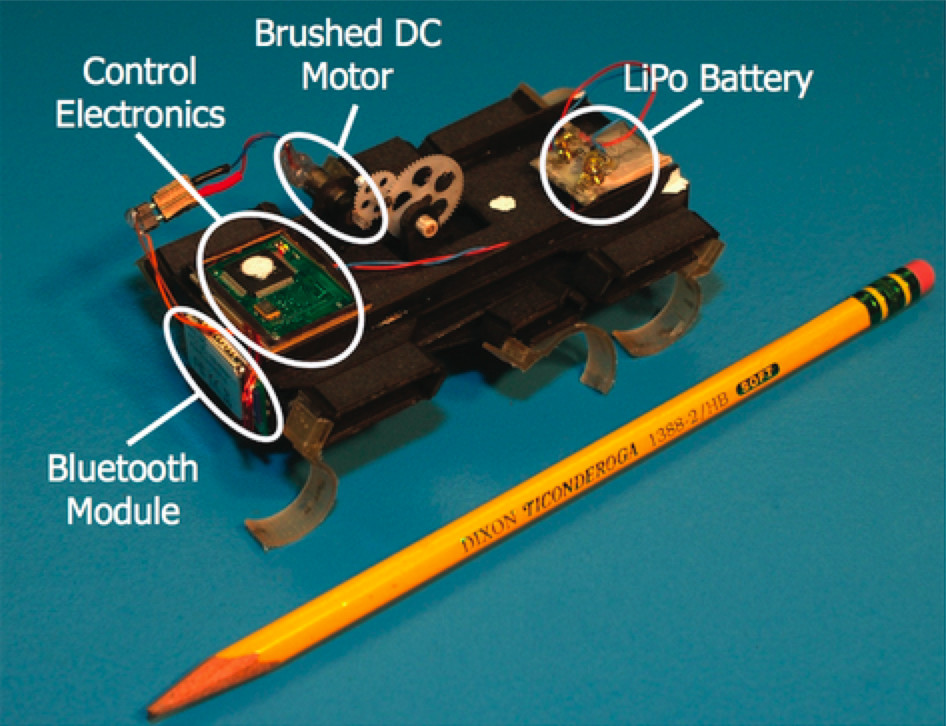
| OctoRoACH:Dual
Drive
MilliRobot (Sept. 2011) The OctoRoACH robot has a mass of less than 30 grams, and includes the ImageProc CPU with gyro, accelerometer, radio and camera, is capable of locomotion in rough surfaces. Robot designed by A. Pullin. Pullin et al. ICRA 2012 |
 |
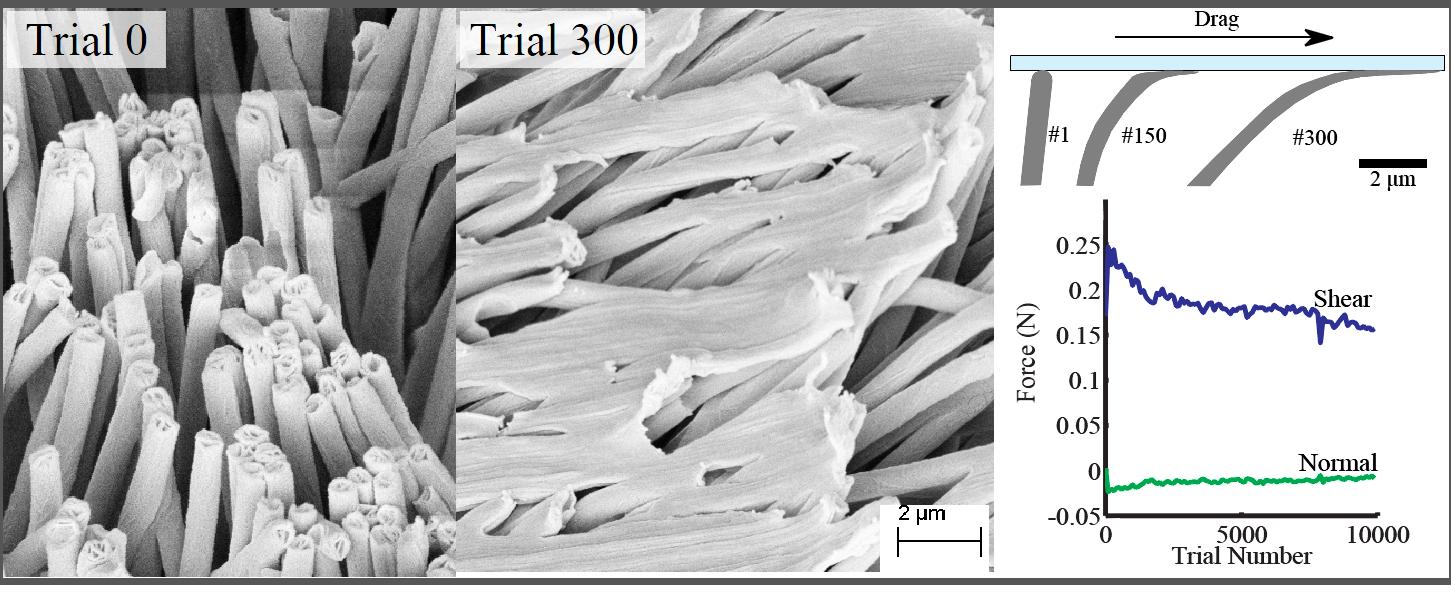
| GSA
Adhesive Material Limits (Aug. 2011) HDPE and PP fibrillar arrays have shear adhesion stress (0.3 MPa) sufficient to deform the fibers. Hence the fiber material strength is a limit to greater adhesion strength. Surprisingly, the GSA maintained 54% of original stress in spite or marked deformation over 10,000 cycles. Shear Adhesion Strength of Thermoplastic Gecko-Inspired Synthetic Adhesive Exceeds Material Limits, Langmuir, 2011 |
 |
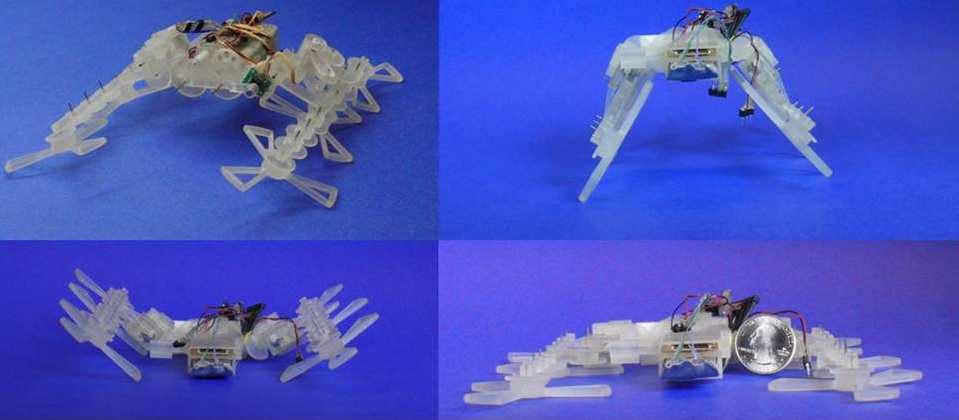
| MEDIC
Millirobot with
belly climbing (May 2011) The Medic robot has a mass of 5.5 grams, and is capable of positioning within 1 mm using static SMA drive. The robot includes camera and wireless. (Kohut et al., ICRA 2011.) |
 |
| DASH
16 gram Hexapedal
Robot (Oct.
2009) Using compliant fiber board as structural material, and a single main driver motor, the DASH robot is capable of 15 body lengths per second on flat surfaces. The structure is resilient and survives ground impact at terminal velocity of 10 meters per second. IROS 2009. Video (Youtube). |
 |
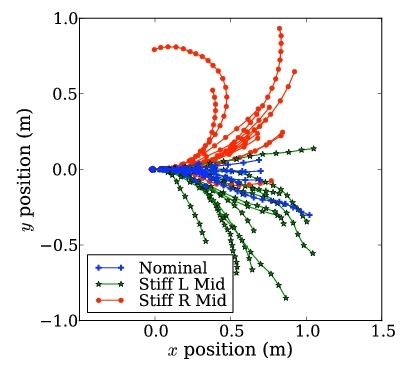
| Dynamic turning by
modulating leg stiffness (Sep. 2010) The dynaRoACH robot has mass of 24 grams and is capable of running at 14 body lengths per second. By changing leg stiffness, the robot can execute a 90 degrees turn in 5 leg strides. BioRob 2010 |
 |
|
Altitude
Regulation
of
iBird
(Sept. 2010)
We identify free flight aerodynamic forces at a stable equilibrium point of an ornithopter and compare them with the tethered flight aerodynamic forces. We developed Closed-loop altitude regulation for the ornithopter using an external camera and onboard electronics shows that the tethered aerodynamic force measurement of a 12 gram ornithopter with zero induced velocity underestimates the total flight force by 24.8 mN. Movie (1.1 MB .avi) Biorob 2010 (Finalist for best paper award) |
 |
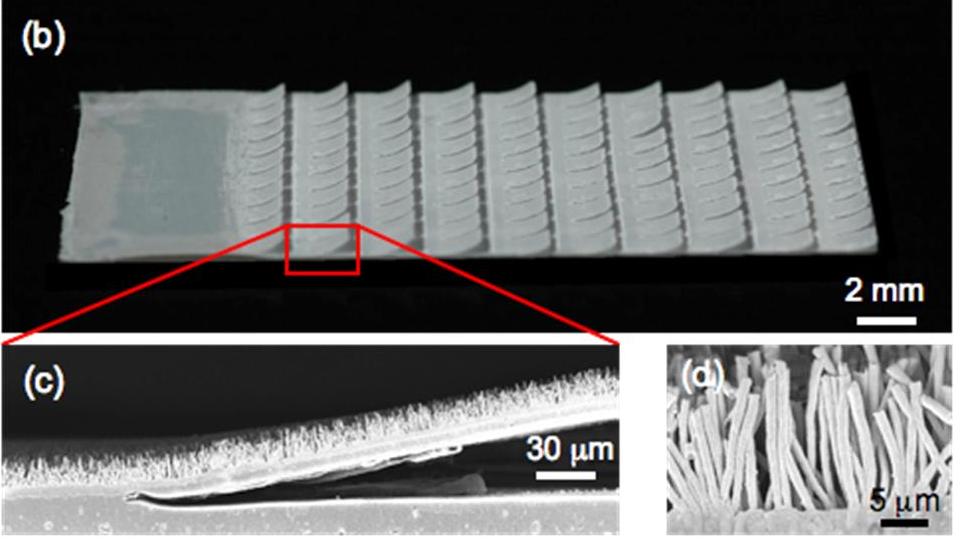
| Combined
Lamellar
Nanofibrillar Array (Oct.
2009) Lamellar
structures act as base support planes for
high-aspect ratio HDPE fiber
arrays. Nanofiber arrays on lamella can adhere
to a smooth grating with
5 times greater shear strength than flat
nanofiber array. Langmuir,
Oct 2009
|
 |
| RoACH
2.0 and DASH on
Granular Media (Apr. 2010) Joint work with Goldman lab at GeorgiaTech to measure cost-of-transport on granular media shows 5-30 J/kg-m at 6-10 body lengths per second. SPIE 2010 |
 |
| Kids
Science Challenge:
Bioinspired Design (Oct.
2009) Bouncing passive
robot construction for
3rd to 6th graders.
Kids Science Challenge |
 |
|
Congratulations to Aaron Hoover for being awarded first place in the Graduate Robots Division of the ASME Student Mechanism and Robot Design Competition, part of the 2009 ASME International Design Engineering Technical Conferences, for ``RoACH: An Autonomous 2.4 gram Crawling Hexapod Robot''! (Sep. 2, 2009) |
 |
| Congratulations to Kevin Ma for being awarded second place in the Mechanisms- Undergraduate Division of the ASME Student Mechanism and Robot Design Competition, part of the 2009 ASME International Design Engineering Technical Conferences, for ``Flexure-based Ornithopter Transmission Mechanism''! (Sep. 2, 2009) | 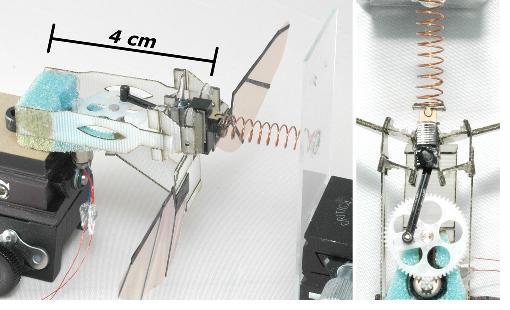 |
| Australia Broadcast
Corp feature on work
in Polypedal and Biomimetic Millisystem Labs (May
2009) Catalyst |
 |
|
Directional Adhesion
of Angled Microfibers
(Nov. 2008)
Angled
polypropylene
microfibers show strong directional adhesion
effects, with shear
strength in direction of fibers 45
times larger than sliding against
fiber directions. A 1 sq. cm. patch supported a
load of 450 grams in
shear. Directional
adhesion
of
gecko
inspired
angled
microfiber
arrays, Applied
Physics Letters, 2008. |
 |
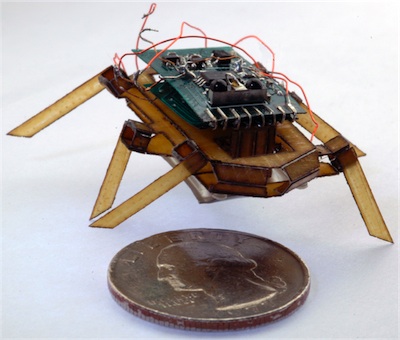
| RoACH:An
Autonomous 2.4 gram hexapod
robot (Sep. 2008) A
new 2.4 gram crawling robot was created which
uses laser machined
glass fiber to create 57 flexure joints. The
robot has on board power
and electronics, and a top speed of 3 cm/sec (~
1 body length per
second).
|
|
|
Self-Cleaning
Gecko Adhesive (Sep. 2008)
First synthetic
gecko
adhesive which cleans itself during use, as the
natural gecko does.
After contamination by microspheres, the
microfiber array loses all
adhesion strength. After repeated contacts with
clean glass, the
microspheres are shed, and the fibers recover
30% of their original
adhesion. The fibers have a non-adhesive default
state, which
encourages particle removal during contact. |
 |
|
Fast Prototyping for
Folded Millirobots (Apr.
2008)
By
using posterboard, laser cutting, and lamination
processes,
multi-jointed robots can be rapidly prototyped in
less than 2 hours. An
example 2X scale crawler model has 57 flexure joints
and can be driven
using shape memory alloy actuation.Hoover ICRA 2008 Fab Process Movie Movie of crawler |
 |
|
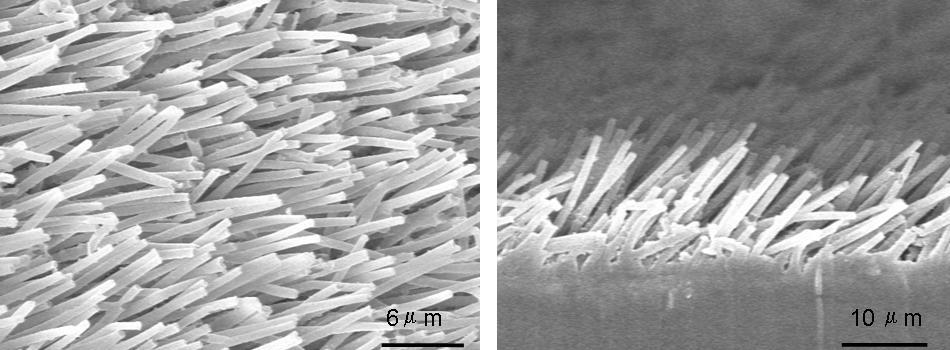
Directional
Gecko
Adhesive
(Jan. 2008)
First easy attach, easy release, and directional
synthetic
gecko adhesive using hard polymer microfibers.
Microfiber array using
42 million polypropylene microfibers per square
centimeter. Patches
can support 9 N/sq.cm. in estimated contact region
with preload of just
0.1N/sq.cm.Sliding-induced adhesion of stiff polymer, Interface 2008 |
 |
|
High Lift with 270 Hz
Wing Beat (Oct.
2007)
By increasing wing
beat
frequency from 170 Hz to 270 Hz, the lift force
generated by
a single wing increased from 500 uN to 1400 uN, more
than 2X the lift
required for the final 100 mg MFI to hover.Steltz et al IROS 2007 |
 |
|
High Power Density
Bimorph Actuator (Oct.
2007)
Dynamometer
testing
shows energy delivery of 19 uJ per cycle from a 10
mg PZT bimorph actuator, with power delivery of >
450 W/kg at 270
Hz. (By comparison, the smallest motor available at
70 mg has power
density < 100 W/kg).Steltz&Fearing, IROS 2007 |
 |
|
ICRA 2006 Plenary
Talk (May 2006)
Challenges for Effective Millirobots |
 |