The kit of parts is assembled using the
Microlaze
system
although the stainless steel triangles require additional assembly
using the
folding mechanism
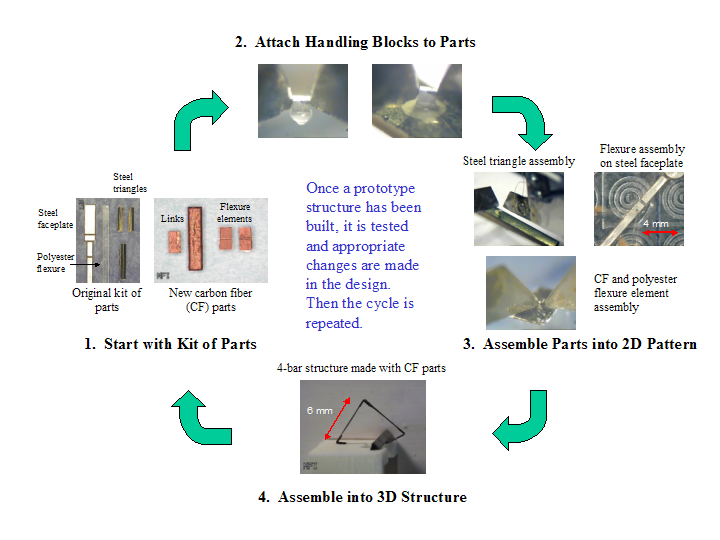
we developed. Once the kit of parts has been established
the user can select the needed parts from this kit (step 1 in the picture
above) and assemble them on a customizable pallet and insert this pallet
into the
Ortho-tweezers
for the assembly into the 2D pattern (steps 2 and 3). (Because the
Ortho-tweezers can manipulate rectangular parts well, we extend its capabilities
to other shapes by attaching a rectangular handling block to the object
to be manipulated.) This process is shown below. Once the 2D
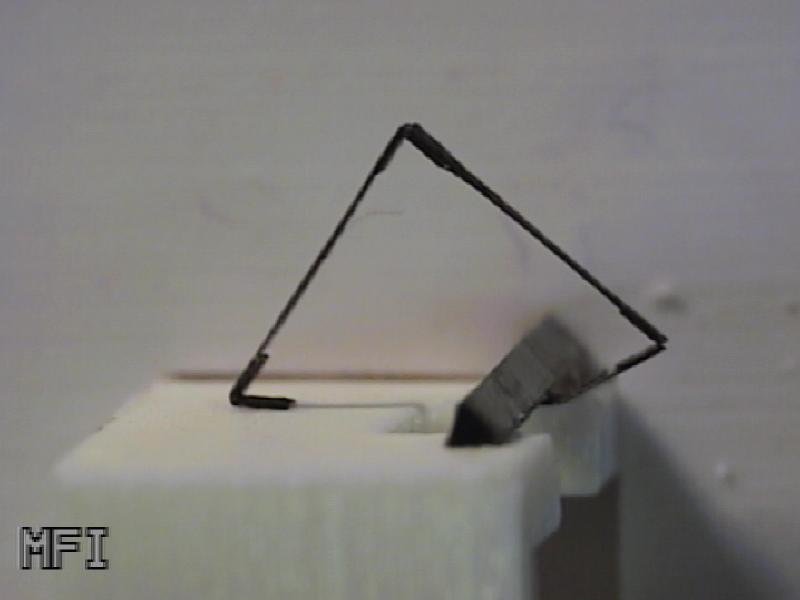
pattern has been assembled it is folded into the 3D structure (step 4).
(This step is done by hand since at this stage we are no longer dealing
with micron sized parts).
Customizable Pallet and Manipulation of Parts by the Ortho-tweezers (details of steps 2 and 3 above)

- This figure shows a sample pallet containing (from left to right) the handling blocks, low melting point wax, needed kit parts, and final configuration location.
- The Ortho-tweezers are picking up a handling block and dipping it in the low melting point wax.
- The handling block is being attached to one of the parts that need to be manipulated.
- The Ortho-tweezers are reorienting the part and placing in its final configuration.
Final Product Examples
|

|
| 4 Bar Mechanism (made with carbon fiber and polyester parts) | 1 Degree of Freedom Wrist (made with stainless steel and polyester parts) |
This research is sponsored by the NSF DMII Program.
``This material is based upon work supported by the National Science
Foundation under Grant No. DMI-0115091. Any opinions, findings and conclusions
or recommendations expressed in this material are those of the author(s)
and do not necessarily reflect the views of the National Science Foundation
(NSF).''