Summary of electronic specifications:
- 8 by 8 sensors (16 by 16 in progress)
- 200 frames per second
- capacitance resolution of 100 attofarad (10^-16 Farad) at 200 Hz
- Schematic of Scanning Clock Circuit
- Schematic of Timing Clock Circuit
- Schematic of Demodulator Circuit
- (.ps) Schematic of Charge Amplifier Circuit (.pdf)
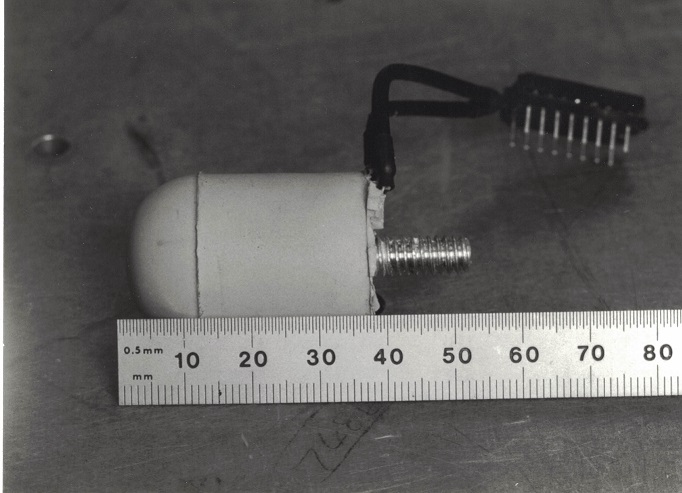
Summary of sensor specifications:
The figure shows a 16 by 3 sensor designed by Ed Nicolson and Kiwoon Kim. We have built sensors ranging from 16x3 on 25 mm diameter to 8 by 8 on 1 mm by 1 mm. For the 25 mm diameter sensor we have:
- 7 bits resolution
- 2% of full scale hysteresis after 1 second
- noise s.d. of 0.05% strain, linear to 10% strain
- Notes on fabrication of cylindrical tactile sensor. (pdf)
Future Directions
- Improved tactile finger construction techniques to allow a more uniform sensor response.
Papers
A Surface Micromachined Microtactile Sensor Array
B.L. Gray and R.S. Fearing
IEEE Int. Conf. Robotics and Automation, April 1996.
Sensing Capabilities of Linear Elastic Cylindrical Fingers,
E. Nicolson and R. Fearing,
In Proceedings, IEEE/RSJ International Conference on Intelligent Robots and Systems'93,
Yokohama, Japan, pp. 178-185, July 1993.
The Reliability of Curvature Estimates from Linear Elastic Tactile Sensors,
E. Nicolson and R. Fearing,
Presented at the 1995 IEEE International Conference on
Robotics and Automation,
Nagoya, Japan, May 1995
Fourier Analysis of the Bandlimited Shape Estimation Problem
in Tactile Sensing,
E. Nicolson and R. Fearing,
Internal Memo, October 1994
Tactile Sensing and Control of a Planar Manipulator
in pdf
E. Nicolson
Ph.D. Thesis, University of California at Berkeley, November 1994.
See also:
"Basic Solid Mechanics for Tactile Sensing,"
R.S. Fearing and J.M. Hollerbach,
Int. Journal of Robotics Research, vol. 4, number 3, Fall, 1985, pp. 40-54
"Tactile Sensing Mechanisms,"
R. S. Fearing,
Int. Journal of Robotics Research, vol. 9, number 3, June, 1990, pp. 3-23
Ed Nicolson's home page
Last update: 11 August 1995
See also:
Ed Nicolson's home page
Last update: 11 August 1995