Generic model of miniature planar robotic workcell. The goal is to build a system on which miniature parts can be transported, tested, and assembled.
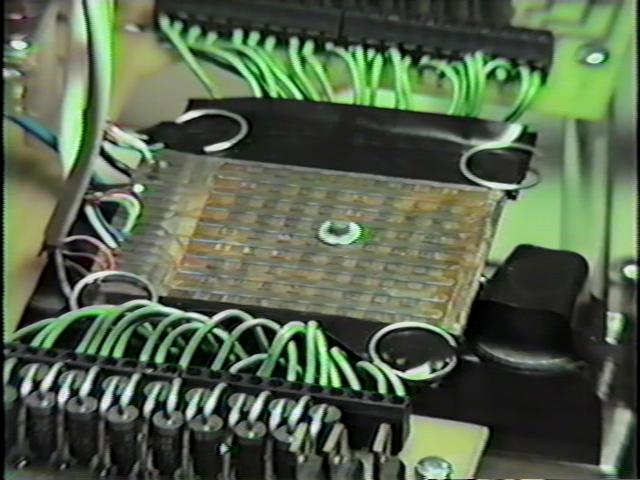
1995 version with squeeze film air bearing, magnet array, and integrated capacitor sensing.
Generic model of miniature planar robotic workcell. The goal is to build a system on which miniature parts can be transported, tested, and assembled. |
1995 version with squeeze film air bearing, magnet array, and integrated capacitor sensing. |
 A Planar Milli-Robot System on an Air
Bearing (Postscript) (Printer
Dependent Format)
A Planar Milli-Robot System on an Air
Bearing (Postscript) (Printer
Dependent Format)