|
RoACH: A Robotic Autonomous Crawling Hexapod
The smallest untethered legged robot until 2011*
|
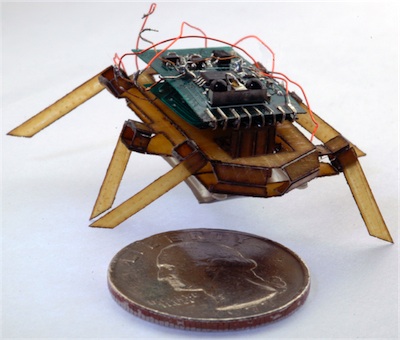 The robot pictured to the right is the Robotic Autonomous Crawling
Hexapod
(RoACH). Fabricated from long fiber-reinforced composites,
this robot makes use of
Smart Composite Microstructures
and integrated shape memory alloy (SMA) wire actuators. In addition to
having novel kinematics that are enabled by the SCM process, all power,
control, and communication electronics are carried onboard and the
entire robot is powered with a 20maHr Lithium-polymer battery from the
Full River corporation. It's capable of walking at about 1 body length
per second (3 cm/sec) for 9.5 minutes.
The robot pictured to the right is the Robotic Autonomous Crawling
Hexapod
(RoACH). Fabricated from long fiber-reinforced composites,
this robot makes use of
Smart Composite Microstructures
and integrated shape memory alloy (SMA) wire actuators. In addition to
having novel kinematics that are enabled by the SCM process, all power,
control, and communication electronics are carried onboard and the
entire robot is powered with a 20maHr Lithium-polymer battery from the
Full River corporation. It's capable of walking at about 1 body length
per second (3 cm/sec) for 9.5 minutes.
Hoover IROS 2008 Movie of RoACH
|
* HAMR3 in A. Baisch et al. IROS 2011 reports a 1.7 gram autonomous robot
at 3 cm/sec.
The importance of kinematic design
|
As
robots get smaller, their design becomes more difficult. In general,
the surface area to volume ratio becomes larger, and this has important
ramifications. Surface forces become large compared to interial forces,
so phenomena such as friction (in bearings or pin joints, for example)
play a more significant role than they did at a larger scale. It also
means that traditional actuator technologies like DC motors are
necessarily less efficient and less power-dense at this scale.
The SCM process goes a long way toward addressing these difficulties.
It enables the fabrication of complicated, functional folded structures
that move using elastic deformation rather than through the use of
traditional mechanical elements like pin joints or bearings. It also
integrates well with novel actuator technologies like piezo-electric
material or shape memory alloy.
However, effective, autonomous millirobots using SCM still require
skill on the part of the designer to create viable designs that use a
minimal number of actuators. Minimizing the number of required
actuators minimizes the power required to drive the robot, making it
more likely to be capable of sustained autonomy. This design goal
therefore forces some of the control of the robot to be integrated into
the kinematic design.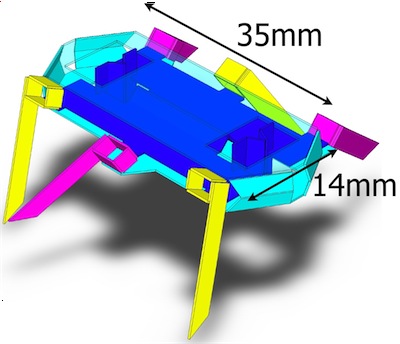
RoACH is an example of an autonomous millirobot in which the kinematics
of locomotion (an alternating tripod gait, in this case) drove the
design of the robot. Pictured to right, RoACH has only two degrees of
freedom and is therefore actuated using only actuators. The central
blue plate forms a linkage known as the Sarrus linkage. When it
contracts, the yellow legs are lifted and the purple legs are lowered.
When it expands, the purple legs are lifted and the yellow legs
lowered. When the blue plate is moved forward along the long axis of
the body (with respect to the outer aqua-colored plates), the yellow
legs swing forward while the purple legs swing backward. When it is
moved backward, the purple legs swing forward while the yellow legs
swing backward.
Proper timing of the actuation of these two degrees of freedom allows the robot to walk forward, backward, and even turn.
|
| Fabrication |
RoACH is fabricated using
a version of the SCM process that has been adapted to work with
prepregnated S2 glass fiber reinforced composites. In this process, a
layer of polymer film is sandwiched between laser-micromachined outer
layers of composite and the whole structure is cured. In places where
the composite has been cut away, the polymer layer acts a compliant
hinge, allowing two rigid composite links to bend with respect to each
other. This process enables the creation of complicated folded robot
designs and can even be scaled up to work with inexpensive materials
for scaled rapid prototyping.
|
Power and Control
|
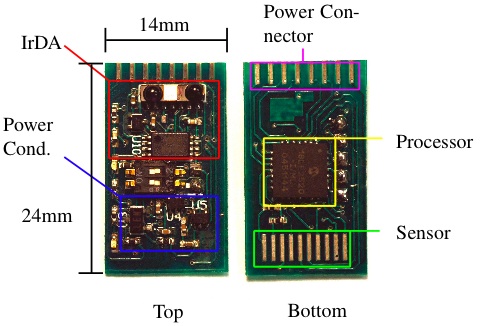 The
RoACH robot is powered using a 20maHr Lithium-polymer battery from Full
River. Control is accomplished with the electronics shown to the right.
The primary components of the board are a 10Mips PIC LF2520
microprocessor and an IrDA communication module for wireless
communication with a PC. The
RoACH robot is powered using a 20maHr Lithium-polymer battery from Full
River. Control is accomplished with the electronics shown to the right.
The primary components of the board are a 10Mips PIC LF2520
microprocessor and an IrDA communication module for wireless
communication with a PC.

The power electronics are pictured on the left and consist of a
standard boost converter topology for increasing the battery voltage to
the level necessary to provide sufficient current to heat the SMA wire
actuators.
|
Performance
|
RoACH weighs: 2.5 grams
Dimensions: 35mm long x 14 mm wide x 13 mm tall
Maximum walking speed: 1 body length (3cm) per second
Maximum battery life: 9min 30secs
Specific power: 15mW/mms-1
For more details see the conference paper on RoACH.
|
|
